
Редактирование облака точек
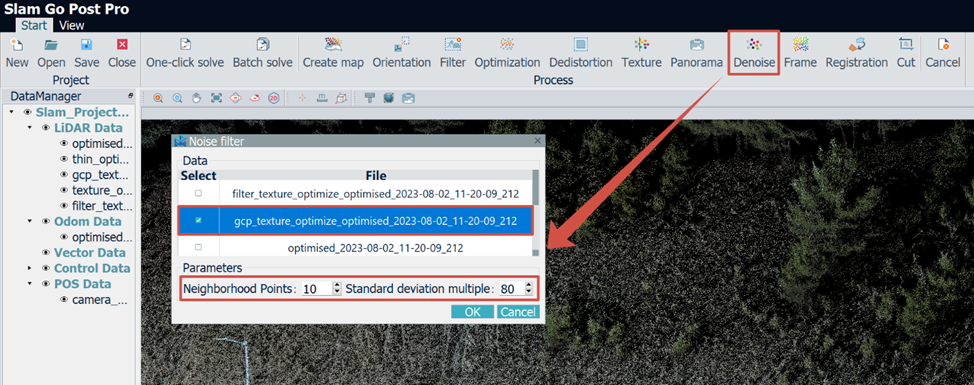
Подавление шума
Данная функция позволяет удалить шум с помощью алгоритма Statistical Outlier Removal.
Выбор облака точек для обработки, задание количества точек окрестности и кратности стандартного отклонения. Значения параметров следующие.
Шум
Neighborhood points – соседние точки: здесь представлено необходимое количество соседних точек для расчета среднего расстояния и стандартного отклонения от каждой точки.
Standard deviation multiple - кратное стандартное отклонение: это значение, умноженное на стандартное отклонение.
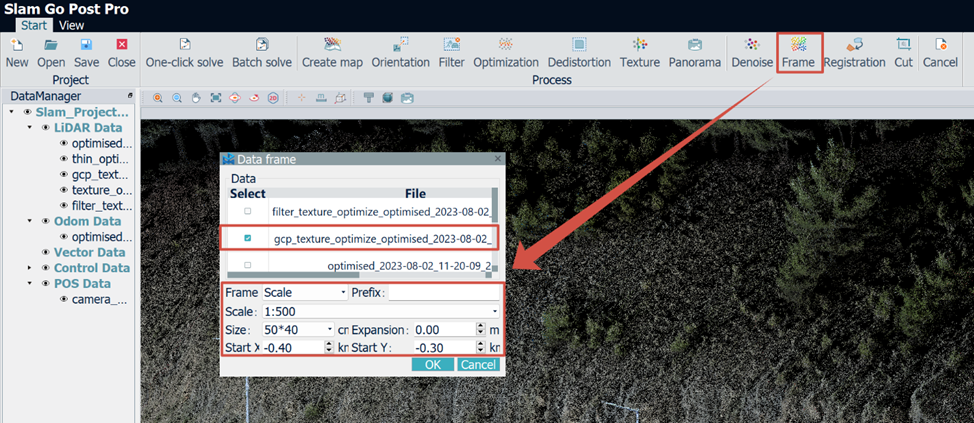
Рамка
Эта функция предназначена для разделения облака точек на фрагменты.
Выберите метод кадрирования (масштабная линейка или фиксированный размер), префикс, масштаб разбивки, размер фрагмента, диапазон расширения и т.д. Затем нажмите кнопку 'framing' для обработки данных.
Разбивка на фрагменты
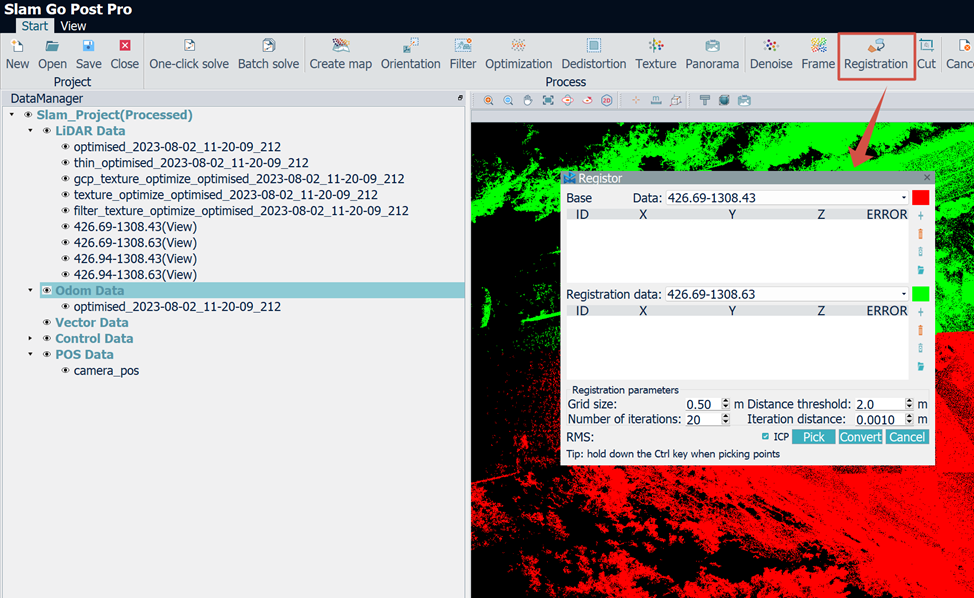
Регистрация облаков
Эта функция предназначена для сшивания нескольких облаков точек.
Перед сшиванием облаков точек Вам необходимо в окно отображения добавить привязанное облако точек и непривязанное облако точек. Процесс сшивания состоит из нескольких этапов:
Добавьте облако опорных точек и облако точек в окно отображения.
Выберите привязанное и непривязанное облако точек одновременно, затем нажмите кнопку 'Registration'.
Выделите пары точек в базовом и непривязанном облаке точек. Порядок следования одноименных точек должен быть последовательным.
Выберите не менее 3 пар точек с одинаковыми именами в привязанном и непривязанном облаке точек, порядок следования одноименных точек должен быть последовательным.
Настройте параметр регистрации (ICP), когда среднеквадратичное значение ошибки регистрации будет соответствовать требованиям точности, нажмите кнопку 'convert' для завершения преобразования.
Сшивание облаков.
Значения параметров ICP следующие:
Grid size - размер сетки облака точек.
Number of iterations - количество итераций алгоритма ICP как правило 20.
Distance threshold – порог расстояния: максимальное расстояние между одноименными точками. Если расстояние до искомой точки совпадения больше порогового значения, то она не будет участвовать в расчете.
Iterative distance - итерационное расстояние: разница между расстояниями, вычисленными до и после, если она меньше этого значения, то выход из итерации.
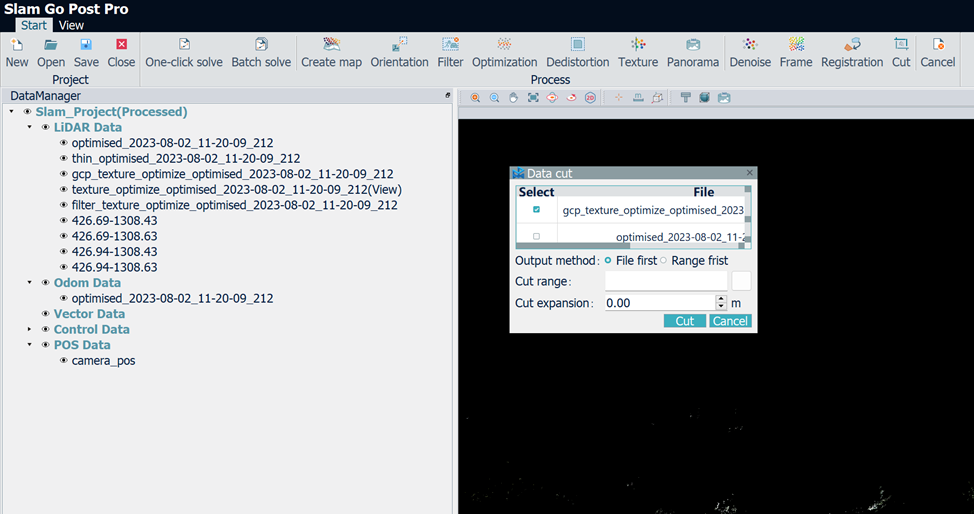
Обрезка
Эта функция позволяет обрезать облако точек в соответствии с диапазоном.
Выберите данные для обрезки, определите способ вывода, импортируйте диапазон обрезки (векторные файлы поддерживают форматы shp, dxf, fmb, kml) и определите диапазон расширения.
Обрезка
Описание каталога результатов

Каталог результатов
- Clip: Обрезанные данные облака точек
- Denoise: Данные облака точек после шумоподавления
- Dimages: Единичное изображение без искажений
- Filter: Данные облака точек после удаления движущихся объектов
- GCP: Абсолютно ориентированный одометр и облако точек
- Odometer: Данные одометра, в которых HF_odometry.txt - высокочастотная одометрия, LF_odometry.txt - разреженная одометрия, а optimized_odometry.txt - оптимизированная одометрия
- Optimizer: Данные облака точек после оптимизации
- Pano: панорама
- Pos: POS-данные изображения, где camera_pos.txt - файл POS изображения, camera_trajectory.txt - файл траектории движения камеры, lidar_trajectory.txt - файл траектории движения лидара
- Register: Данные облака точек после регистрации
- Subdiv: Данные облака точек после кадрирования
- Temp: Временная папка проекта, содержащая информацию о проекте, исходные данные облака точек и журнал. Если у пользователей возникают проблемы, просьба передать журнал техническому инженеру
- Текстура: Данные облака точек после раскраски
- .sprj: Файл проекта
No Comments