
Обработка в один клик
 Обработка в один клик
Обработка в один клик
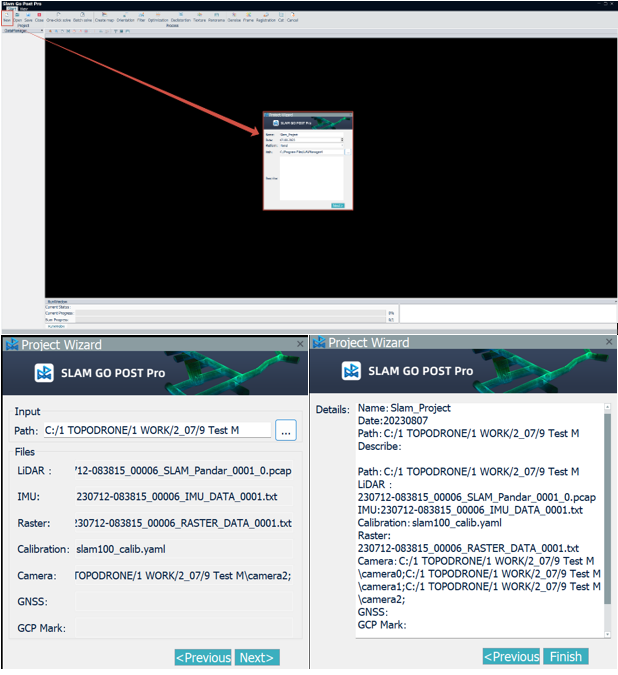
Создание нового проекта
Нажмите кнопку 'New', задайте имя проекта и путь к нему (путь и название не должно содержать кириллицы и символов), выберите платформу 'Handheld' или 'Backpack', нажмите кнопку 'Next', в поле Input Path выберите путь к папке, в которой находится файл данных, то есть следующий ниже путь SN_XXXXX, программа автоматически определит данные в папке, нажмите кнопку 'Finish' для завершения создания проекта.
Создание нового проекта
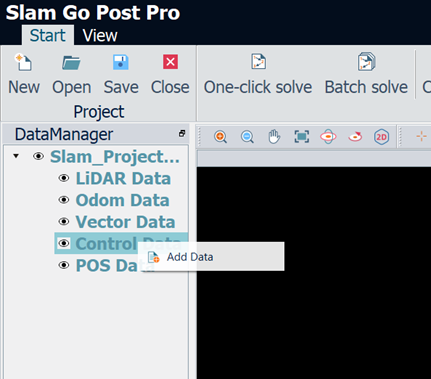
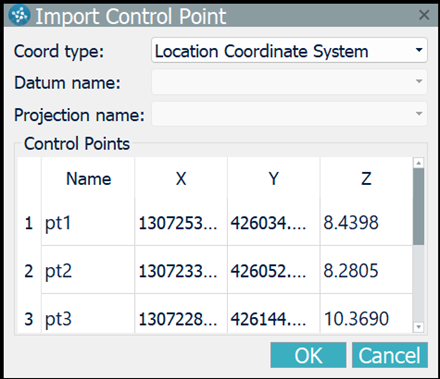
Импорт GCP
Щелкните правой кнопкой мыши на функции данных контрольной точки в окне DataManager, выберите "Добавить данные", импортируйте GCP в программу. Программа поддерживает местную систему координат и местную систему координат. Обратите внимание, что данная настройка не влияет на окончательный вывод координат облака точек. При использовании нежесткого преобразования необходимо задать систему координат.
Импорт GCP
Существует несколько уведомлений о GCP:
- Если контрольных точек нет, то шаг можно игнорировать.
- Порядок контрольных точек в GCP-файле должен соответствовать порядку и количеству реально полученных сканером контрольных точек, иначе обработка приведет к ошибке в ориентации.
- Функция "Контрольная точка" пока не поддерживает широту и долготу, а поддерживает пространственные декартовы координаты. А формат файла контрольной точки должен быть *.txt, в котором содержится четыре колонки по порядку: ID, Восточные координаты, Северные координаты, Высота над уровнем моря, разделенные пробелами или запятыми.
Обработка данных
Если в DataManager имеется два или более проектов, то по умолчанию статус первого проекта активен, а остальные неактивны и выделены черным цветом. Пожалуйста, активируйте проект перед обработкой.
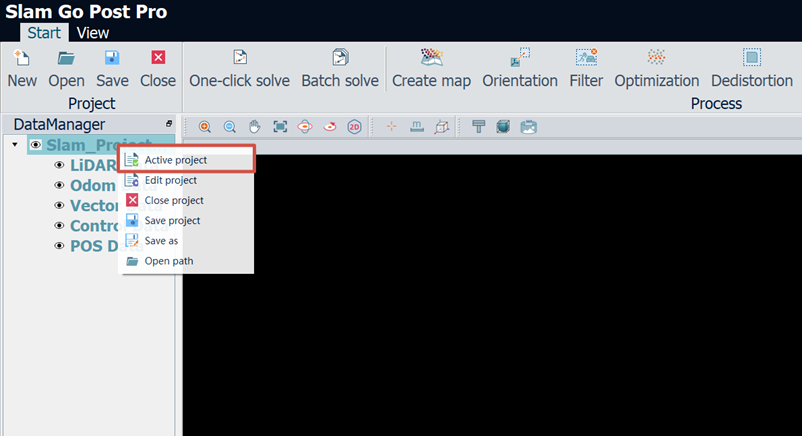
Активация проекта
Для установки параметров решения нажмите кнопку 'One-click Solve' на панели инструментов обработки данных. Значения параметров будут следующие.
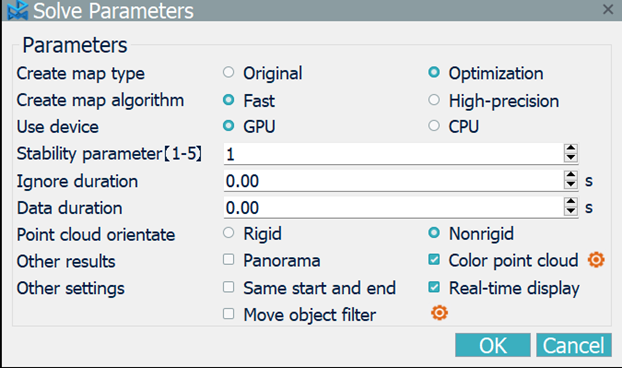
Настройки параметров
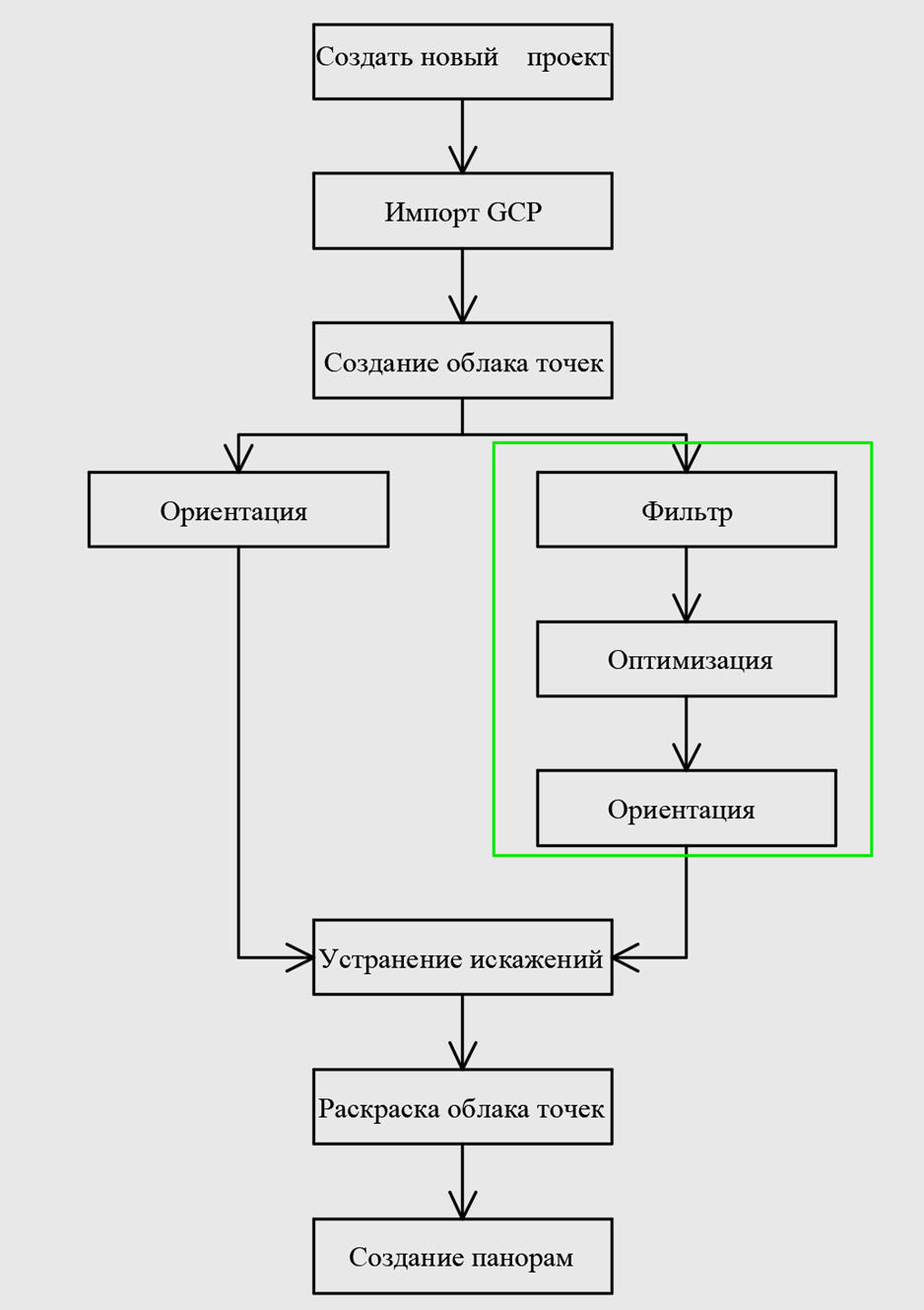
Создание облака точек
Тип Creat Map содержит оригинальную Creat Map и оптимизированную Creat Map.
Оригинальное облако выводит только исходное облако точек.
Оптимизированное облако точек выводит исходное облако точек и оптимизирует исходное облако точек, например, фильтрует, размывает, прореживает облака точек.
Алгоритм создания облака точек
Алгоритм генерации облака точек содержит режимы 'Fast' и 'High-precision'.
Режим 'Fast' отличается высокой скоростью обработки, но низкой точностью облака точек.
Режим 'High-precision' характеризуется низкой скоростью обработки, но высокой точностью облака точек.
Стабильность
Стабильность относится к степени изменения сцены сканирования, а не к стабильности прибора в момент сканирования. Значение стабильности варьируется от 1 до 5. Чем больше значение стабильности, тем строже согласование.
Режим 'Fast'. Установите значение 5, если среда захвата широкая и открытая, и установите значение 4/3, если среда захвата постоянно меняется, например, подъем по лестнице.
Режим 'High-precision'. Запустите разрешение со стабильностью 5 в качестве приоритетного использования.
Если в окне журнала при обработке появляется сообщение "Решение не удалось", это связано с тем, что стабильность слишком высока. В этом случае рекомендуется уменьшить значение стабильности и повторить обработку.
Продолжительность процесса обработки данных
Ignore duration: Устранение избыточных статических /некачественных данных.
Data duration: Этот параметр объединяется с длительностью игнорирования для решения, например, если пользователь хочет получить данные за 10-70 с, то длительность игнорирования составляет 10 с, а длительность обработки данных - 60 с.
Ориентация облака точек
Ориентация облака точек включает в себя жесткое и нежесткое преобразование. При нежестком преобразовании GCP предлагает пластичную компенсацию облака точек с целью улучшения точности.
Если поместить SLAM100 в контрольную точку примерно на 10 с, а не использовать режим 'Control Point Mode' для получения информации о контрольной точке, то жесткое преобразование будет подходящим.
Подключите APP и выберите режим 'Control Point Mode' при сборе данных в полевых условиях.
После сбора данных в исходной папке будет создан файл gcp.txt, и при выполнении решения программа выберет контрольные точки в соответствии с файлом gcp.txt. В данном случае будет применено нежесткое преобразование.
При использовании S-PACK100 совместно с S-RTK 100 скопируйте данные RTK в папку SLAM и выберите 'Pack Mode' при добавлении нового проекта. Результаты, основанные на данных RTK, будут получены с помощью решения в один клик, а используемый здесь направленный алгоритм доступен только для нежесткого преобразования.
Другой результат
В дополнение к исходному облаку точек, оптимизированному облаку точек, можно выводить панорамы и раскрашивать облако точек, которые клиент проверяет в соответствии с реальными требованиями.
 Панорама
Панорама

Цветное облако точек

Цветное облако точек + панорама
Одинаковые начало и конец
Одинаковое начало и конец означает, что начальная и конечная точки совпадают или расстояние между ними не превышает 1 м. Эта функция добавляет принудительное ограничение для устранения наложения слоев вокруг начальной и конечной точек. Однако этот параметр является условным, т.е. при сборе в полевых условиях расстояние между начальной и конечной точками должно быть одинаковым или не превышать 1 м, поэтому в обычной ситуации выбирать его нет необходимости.
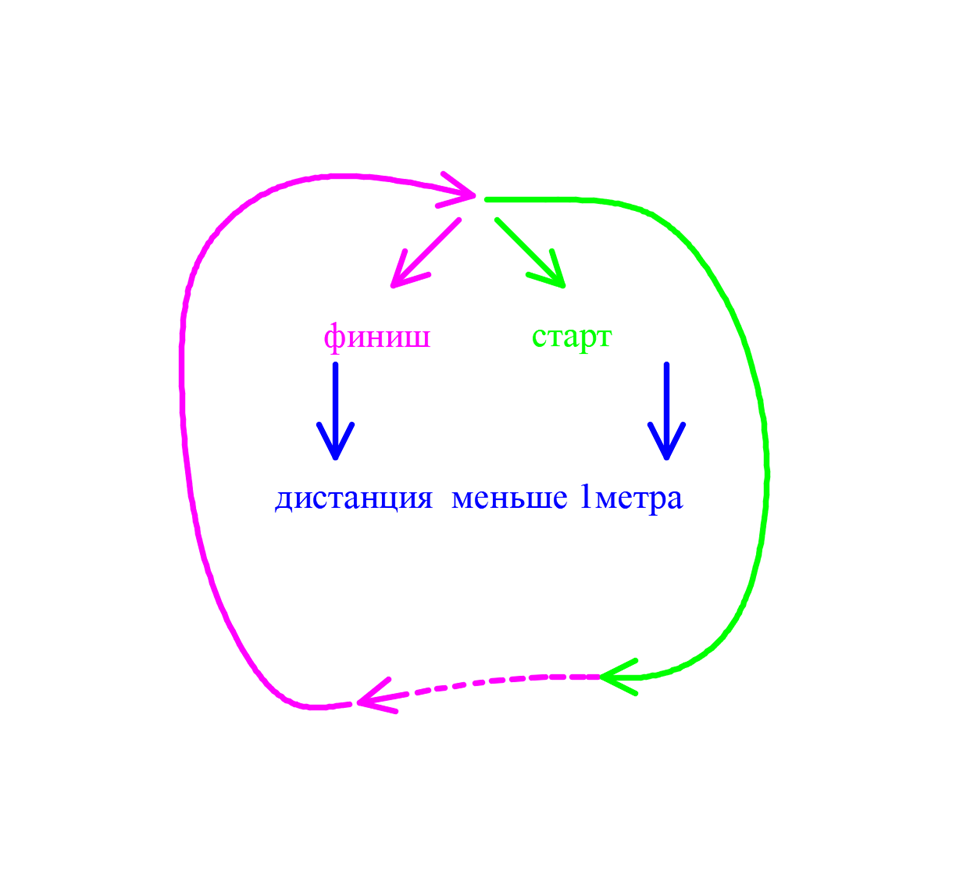
Одинаковые начальная и конечная точки
Отображение в реальном времени
Эта функция в главном окне отображает облако точек в реальном времени.
 Отображение в реальном времени
Отображение в реальном времени
No Comments