
Аэрофотосъемка
Выберите вкладку "Аэрофотосъемка" для настройки параметров обработки модулей PPK Post Processing и RTK Post Processing.
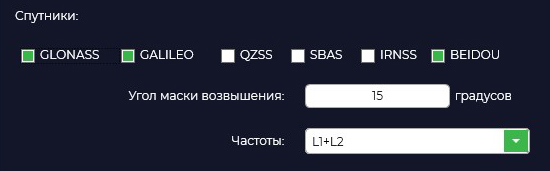
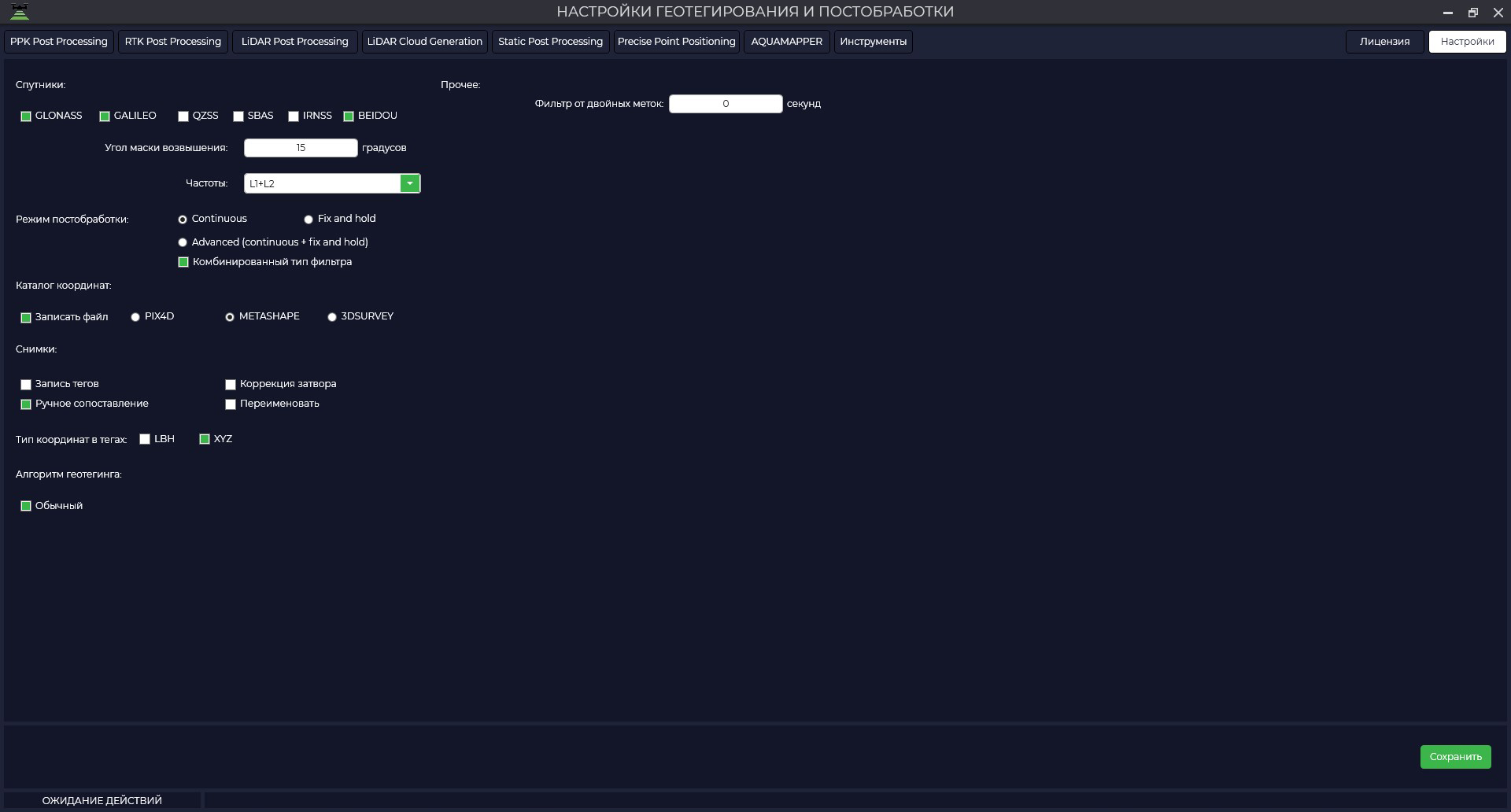 В окне «Спутники» можно включить или отключить из обработки определенные спутниковые группировки, указать необходимую маску возвышения и выбрать частоты, по которым необходимо выполнить обработку.
В окне «Спутники» можно включить или отключить из обработки определенные спутниковые группировки, указать необходимую маску возвышения и выбрать частоты, по которым необходимо выполнить обработку.
В окне Режим постобработки можно выбрать один из параметров: Continuous, Fix and hold или Advanced.

В режиме «Fix and Hold» программа стремится получить фиксированное решение позиционирования, которое обеспечивает наивысшую точность и надежность. Он использует информацию от базовой станции и ровера для вычисления относительной позиции и затем усиливает это решение, чтобы достичь фиксации. Когда достигается фиксация, программа удерживает это решение как можно дольше, даже если качество сигнала временно падает или некоторые спутники теряются.
Цель режима «Fix and Hold» – обеспечить стабильное и надежное фиксированное решение, что особенно полезно в геодезических приложениях, где требуется высокая точность и долговременная стабильность. Этот режим может быть предпочтительным, когда важно избегать переключений между решениями и обеспечить непрерывность фиксации даже в условиях временных изменений (например, отражения сигналов или прохождение через преграды).
В режиме «Continuous» алгоритм обрабатывает данные непрерывно и обновляет результаты позиционирования по мере получения новых данных. В отличие от режима «Fix and Hold», здесь программа не фиксирует решение, а непрерывно вычисляет позицию ровера на основе текущих данных. При получении новых наблюдений, программа обновляет позицию, учитывая эти данные и предыдущие результаты.
Режим «Continuous» обеспечивает более актуальные результаты позиционирования, поскольку он непрерывно обновляет позицию на основе последних данных. Он может быть полезен в приложениях, где актуальность и динамические изменения позиции более важны.
Выбор между режимами "Fix and Hold" и "Continuous" зависит от конкретных требований и условий приложения. Если важна стабильность и надежность фиксации решения, особенно в статических условиях, режим "Fix and Hold" может быть предпочтительным. Если же актуальность и динамика позиционирования играют более важную роль, режим "Continuous" обеспечивает более непрерывное обновление позиции на основе последних данных.
Режим «Advanced» является комбинацией предыдущих режимов со всеми их плюсами, но обработка данных занимает немного больше времени.
В окне «Каталог координат» необходимо поставить галочку «Записать файл» для сохранения каталога центров фотографирования и выбрать формат файла для используемой Вами программы.

В окне «Снимки» можно сохранить координаты центров фотографирования в EXIF файл фотографии, присвоить фотографиям уникальное имя в зависимости от времени создания, рекомендуется поставить галочку «Ручное сопоставление», для правильного совмещение фотографий и меток, галочка «Коррекция затвора» отвечает за смещение метки на половину времени выдержки.

В случае, если в предыдущем окне поставили галочку «Запись тегов», то необходимо выбрать формат сохранения координат (LBH – географические координаты, XYZ – прямоугольные координаты)

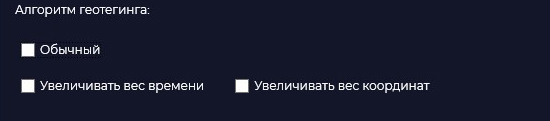
На вкладке «Алгоритм геотегинга» находятся настройки, позволяющие помочь программе совместить фотографии и метки в случае несоответствия количества.
Обычный – совмещение происходит по порядку сделанных фотографий.
Увеличивать вес времени – совмещение происходит по времени создания фотографий и меток.
Увеличивать вес координат – Совмещение происходит по навигационным координатам содержащихся в тегах фотографий и высокоточным координатам меток в результате постобработки в программе TOPODRONE Post Processing.
При маршрутах, в которых одни фотографии накладываются на другие алгоритм совмещения по координатам может работать не корректно. Пример: маршрут на одном аккумуляторе при съемке небольшого объекта для 3Д реконструкции. В случае съемки, когда камера направлена в надир, а затем сразу происходит съемка, когда летательный аппарат производит съемку перспективы.
Фильтр от двойных меток позволяет на этапе постобработки удалить лишние метки. Значение по умолчанию 0.2 секунды.

No Comments