
Новая страница

Набор инструментов UgCS для планирования полётов с использованием лидара доступен для лицензий UgCS EXPERT и ENTERPRISE и поддерживаемых дронов DJI. Чтобы использовать набор инструментов для лидара, создайте новый маршрут для автопилотов DJI M210/M200, M600, M300, M350, M400 или PX4/Ardu.
Чтобы получить точные результаты лидарного сканирования, пилоту необходимо следовать приведенным ниже правилам:
• Правильно инициализируйте IMU
Инициализация IMU обычно выполняется не менее двух раз за полет. До начала сканирования и после окончания сканирования. При необходимости пилот может приостановить полет и выполнить дополнительную инициализацию IMU для сброса накопленных ошибок. Эта функция реализована в виде команды дрону (для некоторых моделей DJI), поэтому пилот может запустить ее в любое время. Для выполнения этой команды дрон уже должен быть в воздухе.
• Поддерживайте правильную высоту полёта и расстояние между линиями сканирования, чтобы обеспечить охват и плотность точек
• Обеспечьте правильные повороты дрона и линейное сканирование, чтобы свести к минимуму накопление ошибок инерциального измерительного блока и чрезмерную тряску лидара над интересующей вас областью.
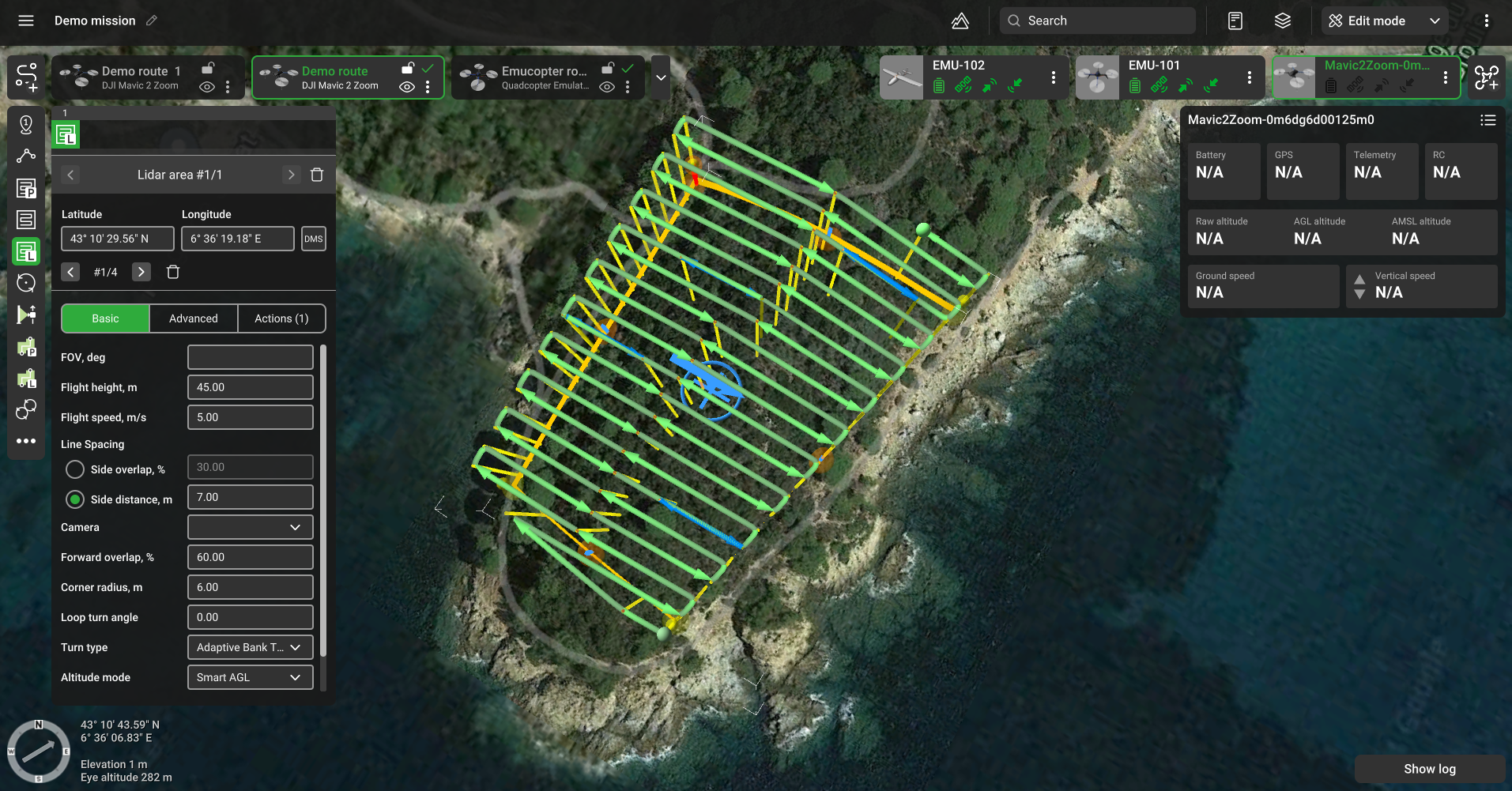
Лидарное сканирование области аналогично инструменту «Сканирование области». Для инструмента «Лидарное сканирование области» доступны следующие параметры:

Угол обзора, град — угол обзора в градусах. Это видимая область сцены, зафиксированной датчиком изображения, выраженная в градусах.
Высота полёта — высота полёта над территорией.
Интервал между строками — есть 2 варианта. Пилот может указать
- боковое перекрытие в процентах.
- расстояние между сторонами в метрах.
В случае с процентным соотношением программа рассчитает расстояние между линиями на основе угла обзора и высоты полёта.
Камера — список предварительно настроенных профилей камер (необязательно)
Перекрытие при движении вперед — коэффициент перекрытия в соседних кадрах. Значение устанавливается в диапазоне от 1 % до 90 %.
Радиус поворота — радиус адаптивного поворота.
Угол поворота петли — максимальное значение, при котором программа будет добавлять петли для поворотов. При значениях, превышающих «Угол поворота петли», будут использоваться стандартные повороты. Диапазон значений: (0;180)
Значение по умолчанию: 90.
Режим высоты — AMSL, AGL, Smart AGL или дальномер для установки высоты полёта.
Калибровка IMU — включает калибровку IMU для сегмента. Подробнее здесь — Калибровка LiDAR

Допуск по высоте над уровнем земли — позволяет летать по прямой траектории над слегка холмистой местностью, задавая точность, с которой БПЛА должен придерживаться заданной высоты над уровнем земли. Для поддержания заданной высоты будут добавлены дополнительные путевые точки, если разница в высоте превышает допуск по высоте над уровнем земли. Чем меньше допуск по высоте над уровнем земли, тем больше будет добавлено путевых точек. Если допуск по высоте над уровнем земли равен 0 (нулю) высота БПЛА будет постоянной на протяжении всего маршрута, но будет добавлено много дополнительных путевых точек.
Угол направления — указывает азимут пересылаемых сообщений.
Overshoot — продлевает прямой проход на указанное количество метров. Overshoot дает дрону пространство для разворота и максимально прямого возвращения в зону сканирования.
Скорость превышения — скорость дрона на участках превышения.
Прямой участок после поворота — для лидаров крайне важно, чтобы после каждого поворота был прямой участок длиной не менее X метров перед входом в следующий сегмент. По умолчанию: 10 метров.
Буфер зоны — расширяет зону сканирования во всех направлениях на указанное количество метров.
Выполнение действия:
- Каждая точка — действия будут генерироваться во всех путевых точках;
- В начале — алгоритм будет генерировать действия только в первой путевой точке;
- Проходы вперед — действия генерируются во всех точках во время прохода, полезная нагрузка отключается на поворотах
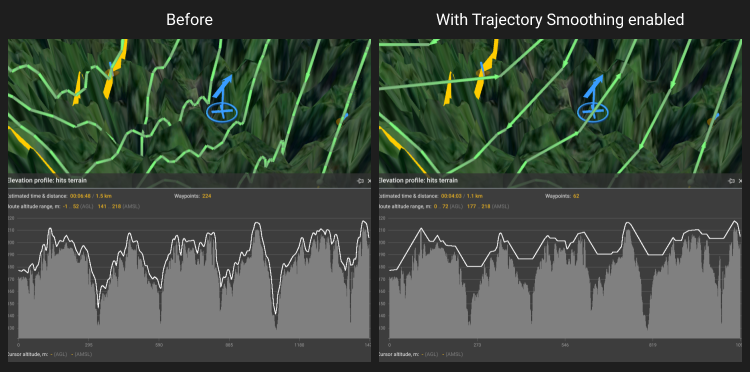
Сглаживание траектории
Включает две опции: «Максимальный наклон» и «Минимальный зазор», которые делают траекторию более плавной за счёт ограничения угла наклона и игнорирования зазоров.
Двойная сетка — флажок. Если флажок установлен, траектория представляет собой двойную сетку; в противном случае — одинарную сетку (змеевидную).
Никаких действий в последней точке — не запускайте камеру после последней точки сегмента.
No Comments