
Воздушное Лазерное Сканирование (ВЛС)
Правила выполнения ВЛС с лазерным сканером TOPODRONE:
1. Соседние пролёты (далее для упрощения - сканы) должны иметь боковое перекрытие 30% или больше.
2. Сканы должны быть параллельны друг-другу.
3. Дрон должен следовать по соседним сканам в прямом и обратном направлениях.
4. Скорость перемещения дрона с лазерным сканером на основном участке ВЛС должна быть постоянной.
5. Расстяние от лазерного сканера до поверхности земли должно быть постоянным.
6. Для получения корректных данных ВЛС, рекомендуется делать не менее двух сканов.
7. Используйте оригинальыне пропеллеры для снижения вибраций.
8. Не летайте при шквальном ветре или во время осадков для снижения шумов.
9. После инициализации лазерного сканера TOPODRONE и взлёта БВС необходимо выполнить калибровочный манёвр перед основным участком ВЛС в кажом полёте.
10. Если полёт БВС занимает более 30 минут, рекомендуется выполнять калибровочный манёвр повторно по достижении времени сессии 30 минут после включения лазерного сканера TOPODRONE.
ВЛС и перепад высот местности:
При незначительных перепадах высот на локации проведения ВЛС (до 10 метров) допускается выполнение полета дрона с лазерным сканером TOPODRONE на фиксированной высоте (AMSL). Высота полета дрона устанавливается относительно высоты точки взлета. Соответственно, для основной части полёта, может быть использовано практически любое ПО, позволяющее устанавливать полёт по окружности (для выполнения калибровочного манёвра), а так же устанавливать расстояние между параллельными проходами.
При превышении перепадов высот на локации проведения ВЛС (10 метров и более), для планирования маршрута ВЛС необходимо использовать ПО, поддерживающее функцию "огибания рельефа" (AGL). Удобнее всего выполнять планирование таких маршрутов в ПО UgCS Expert.
Планирование площадного маршрута ВЛС
Приводится на примере ПО UgCS Expert и дрона DJI M300/M350 RTK:
- Установить ПО UgCS Expert и открыть его.
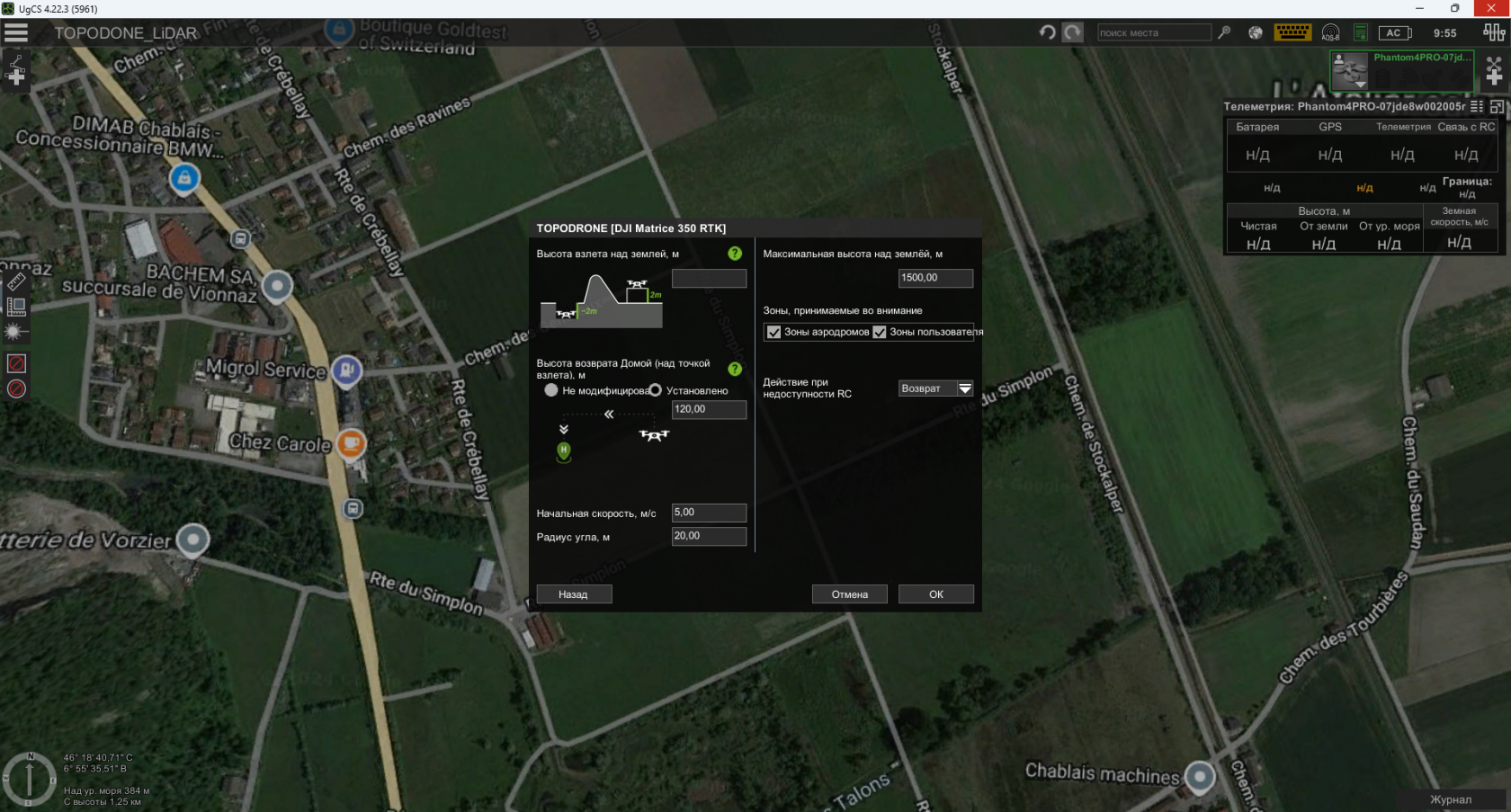
- Создать новую миссию и создать маршрут для профиля дрона DJI M300 RTK или DJI M350 RTK
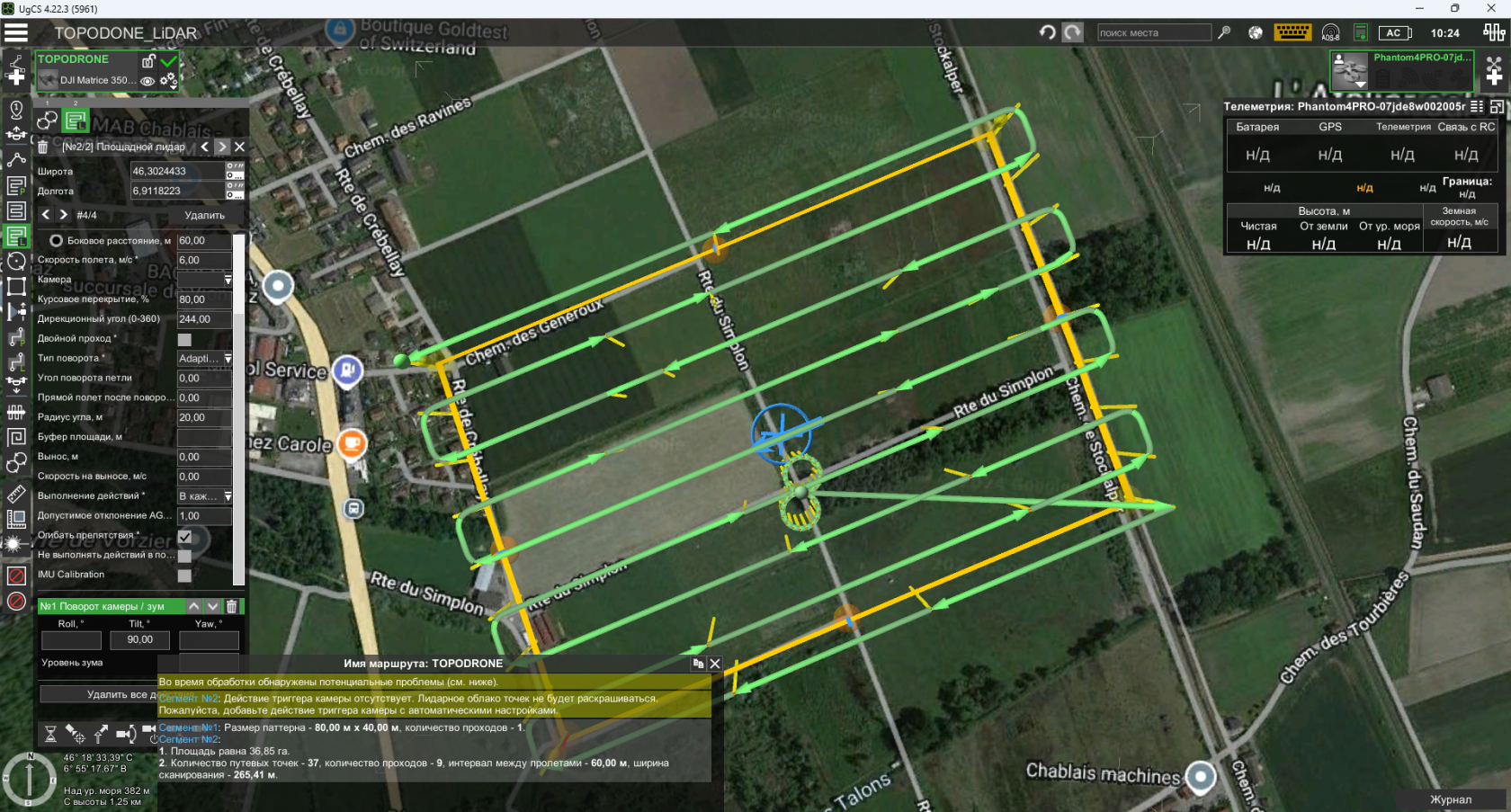
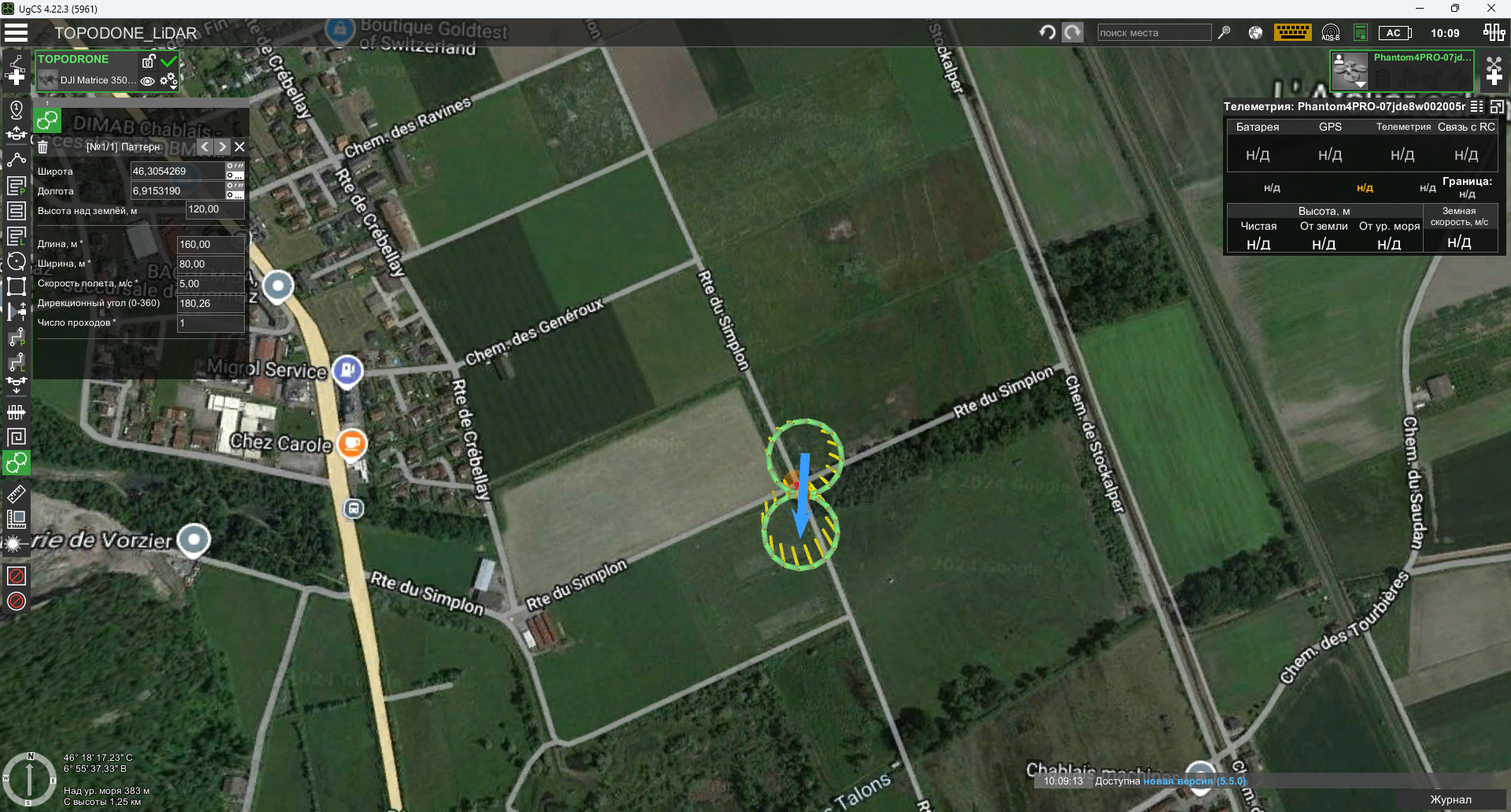
- Используя инструмент "Паттерн" установить калибровочный манёвр в виде знака бесконечности максимально близко к планируемой точке старта маршрута.
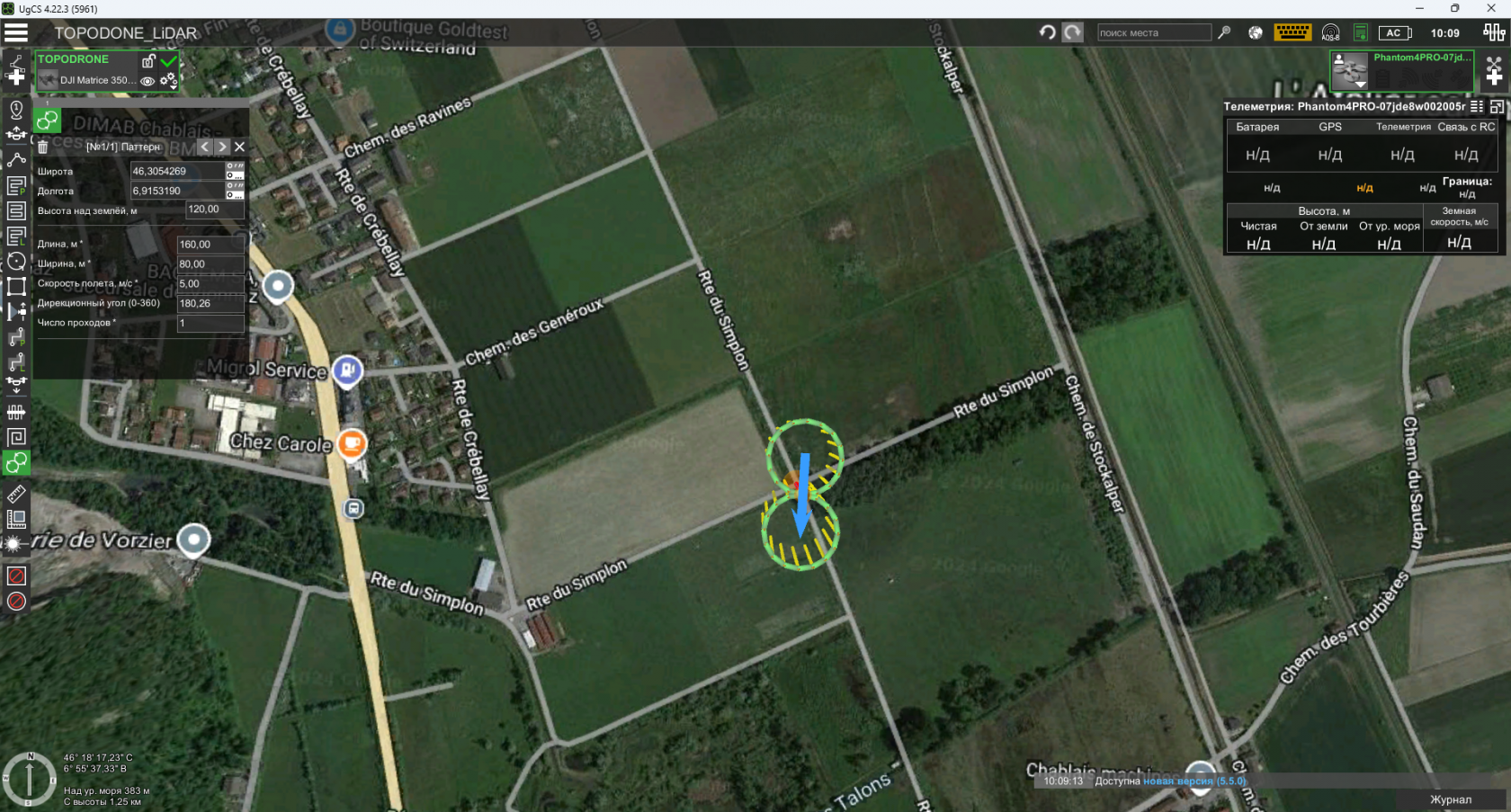
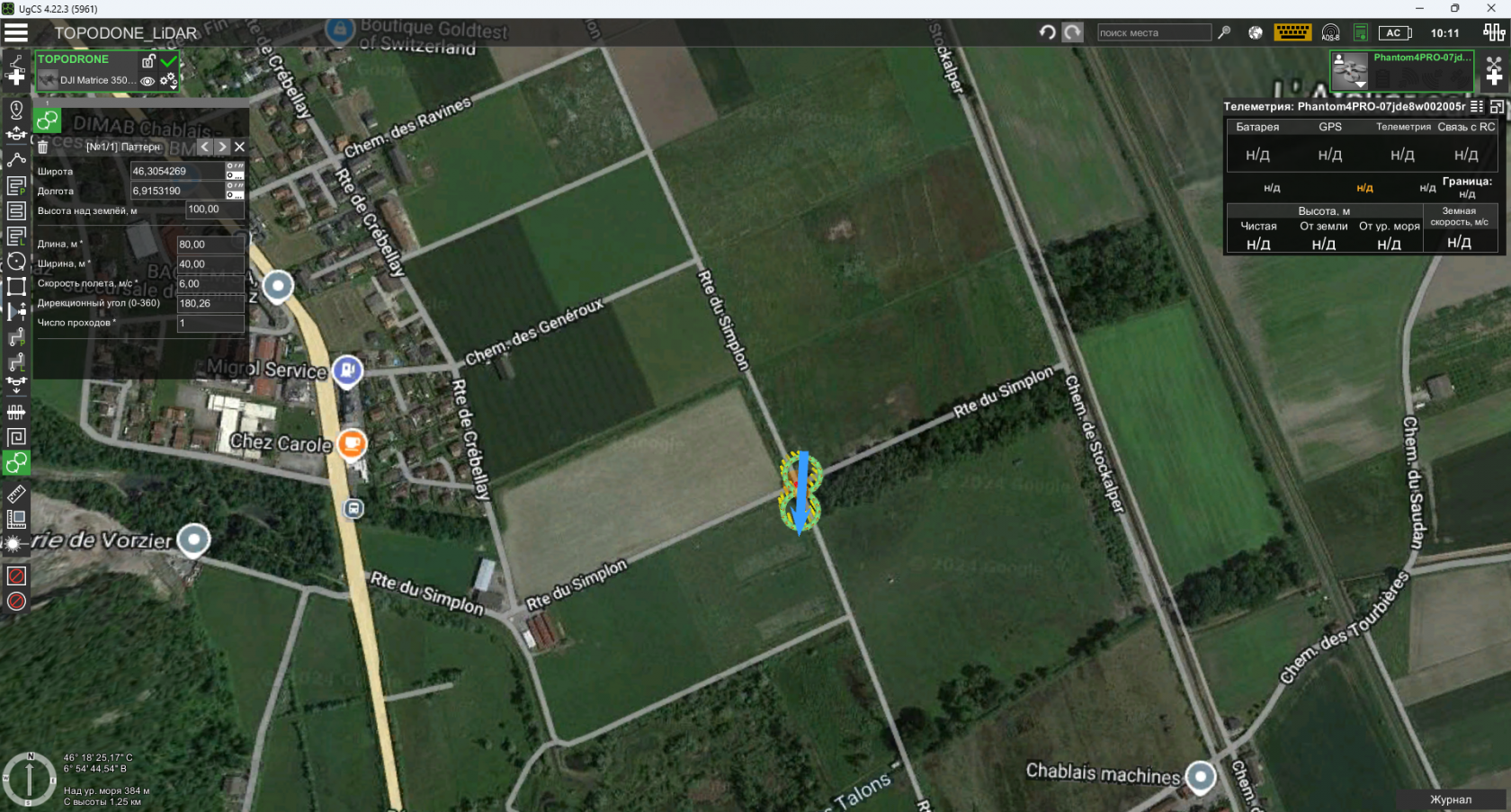
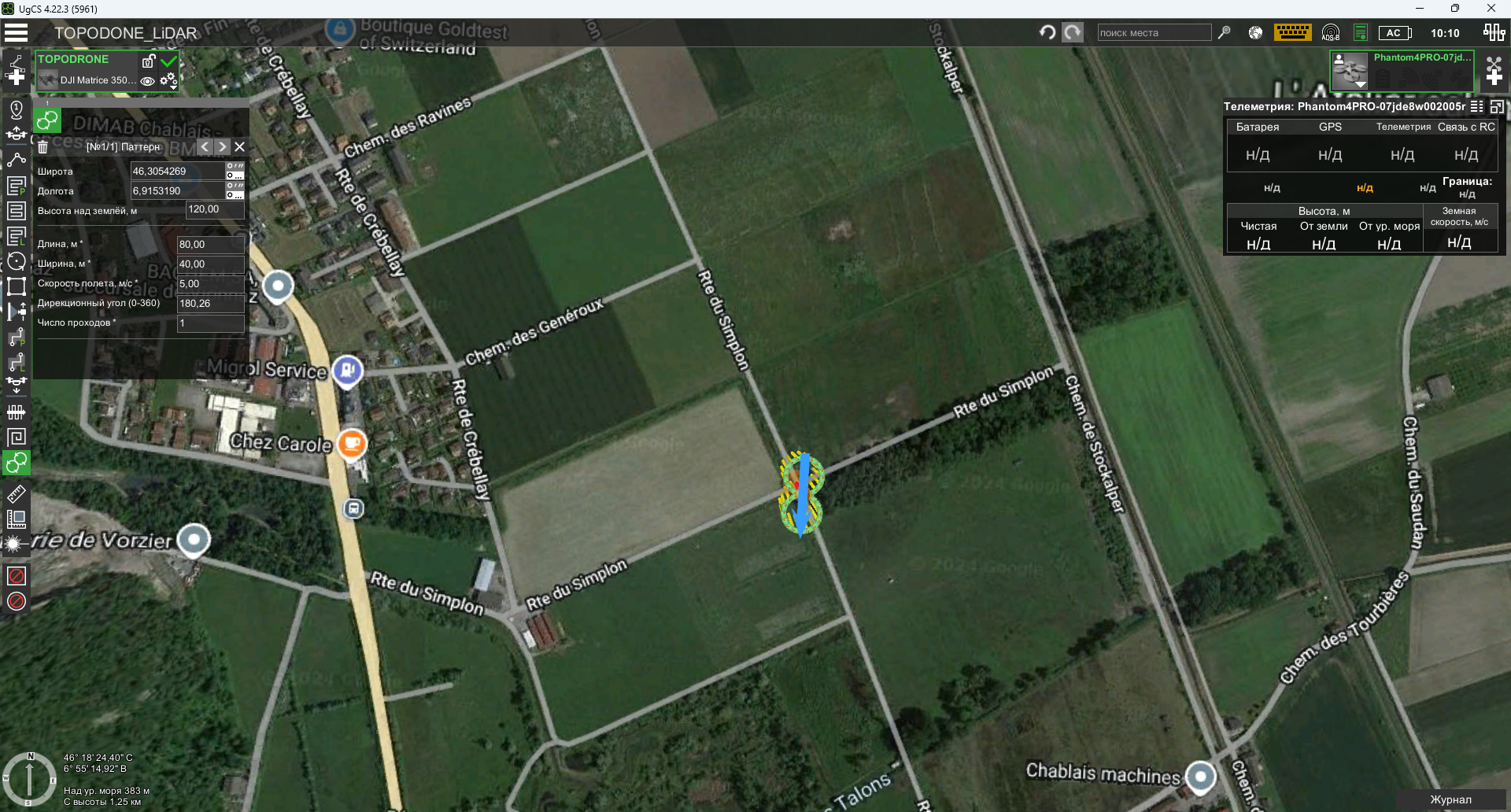
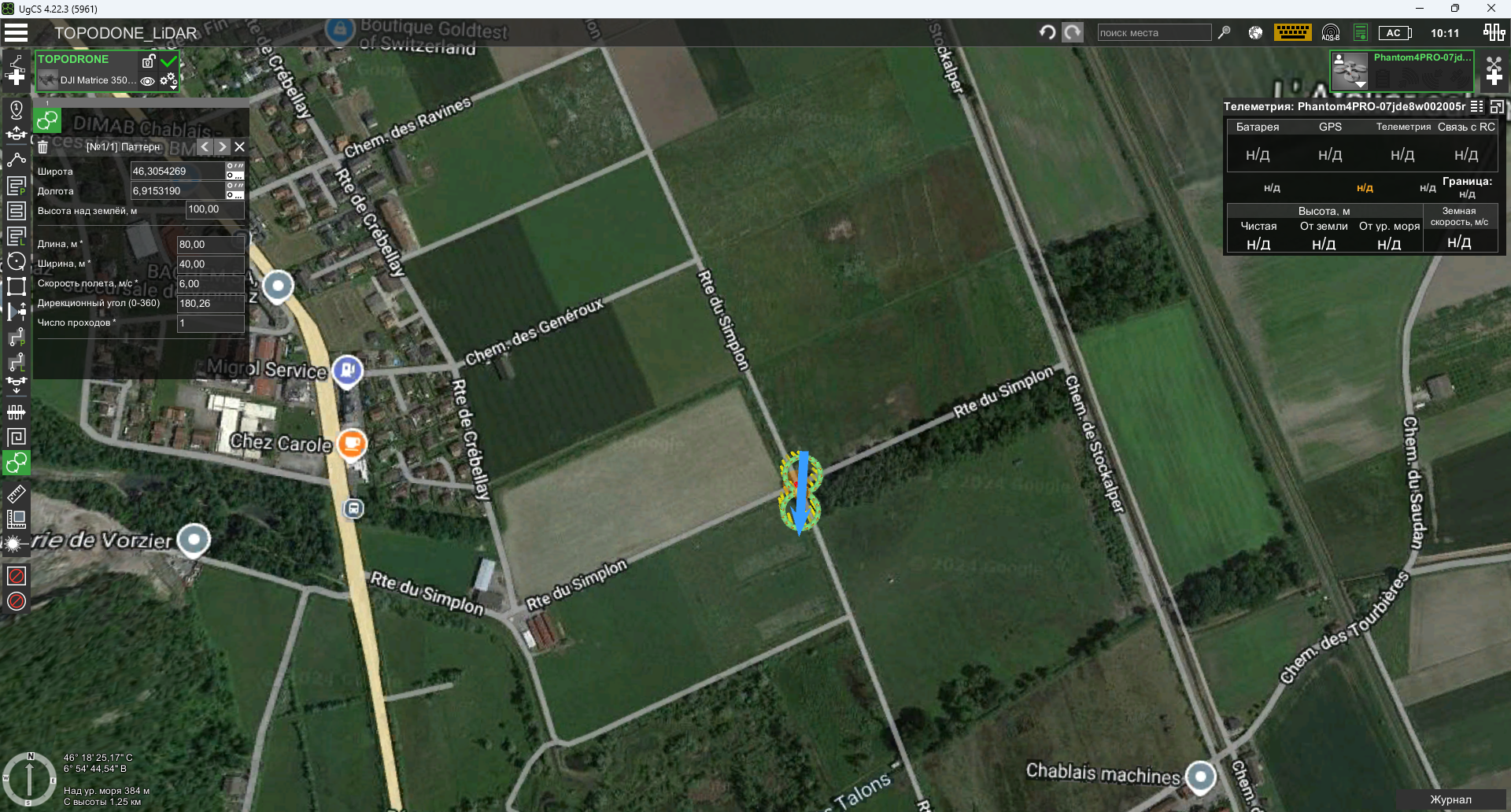
- Установить параметры "Длина" и "Ширина" на значения 80 и 40 метров соответственно
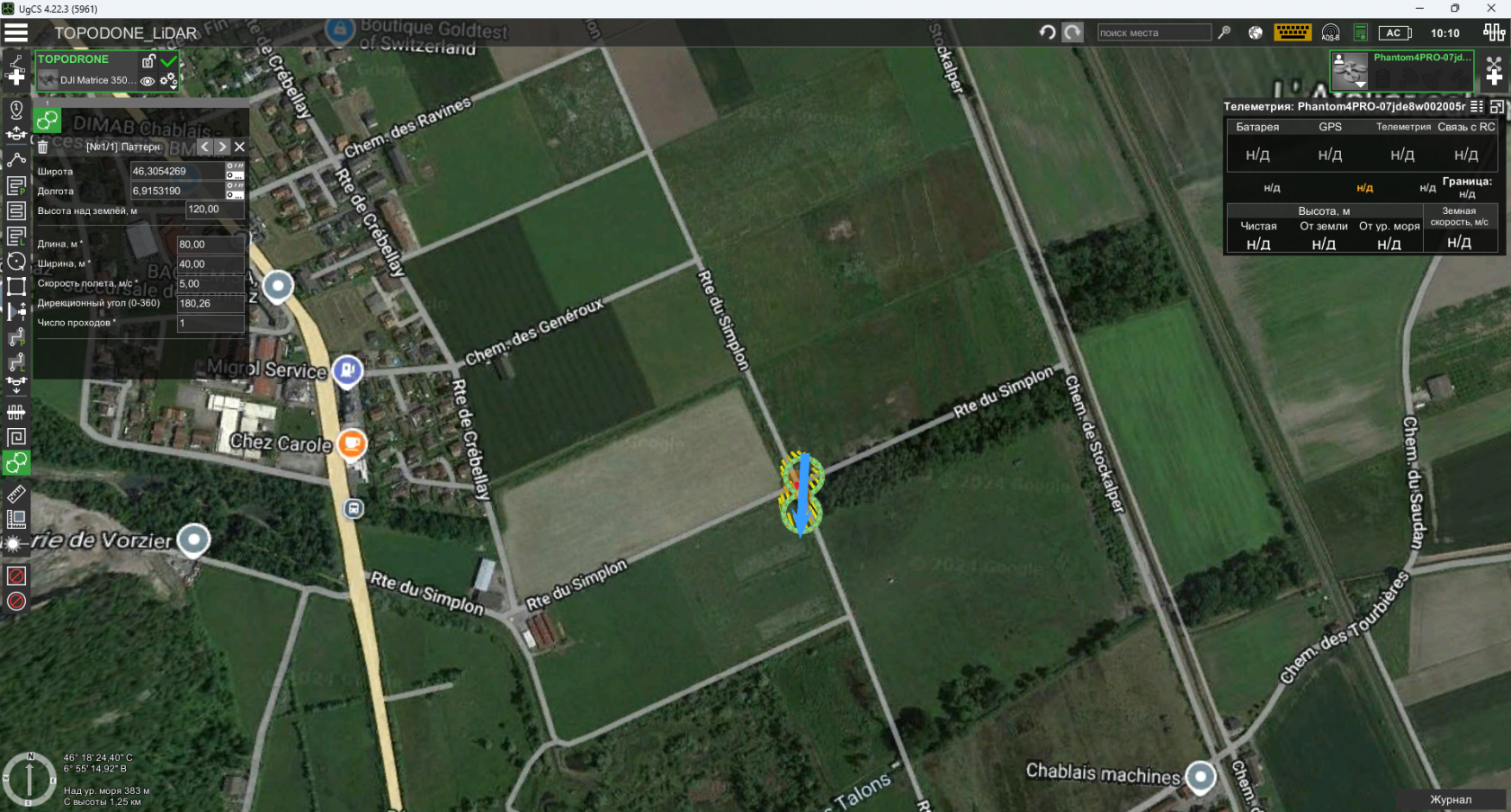
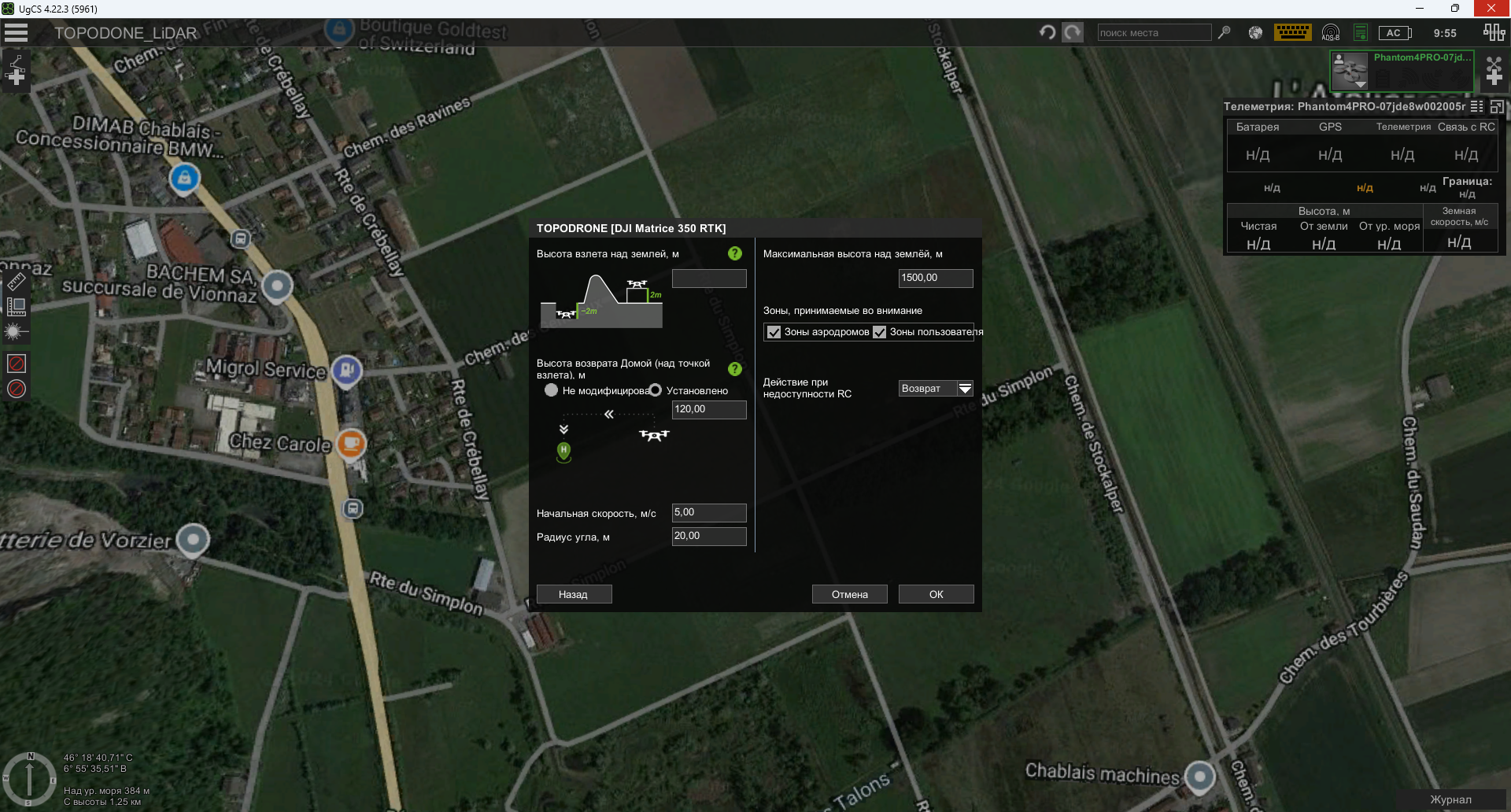
- Установить параметры "Высота" и "Скорость полёта" на высоте и со скоростью предполагаемого выполнения маршрута.
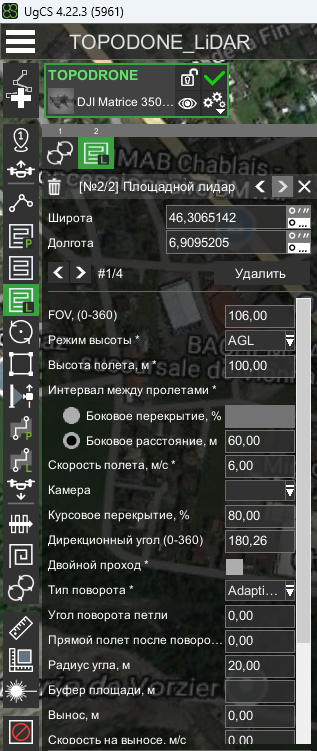
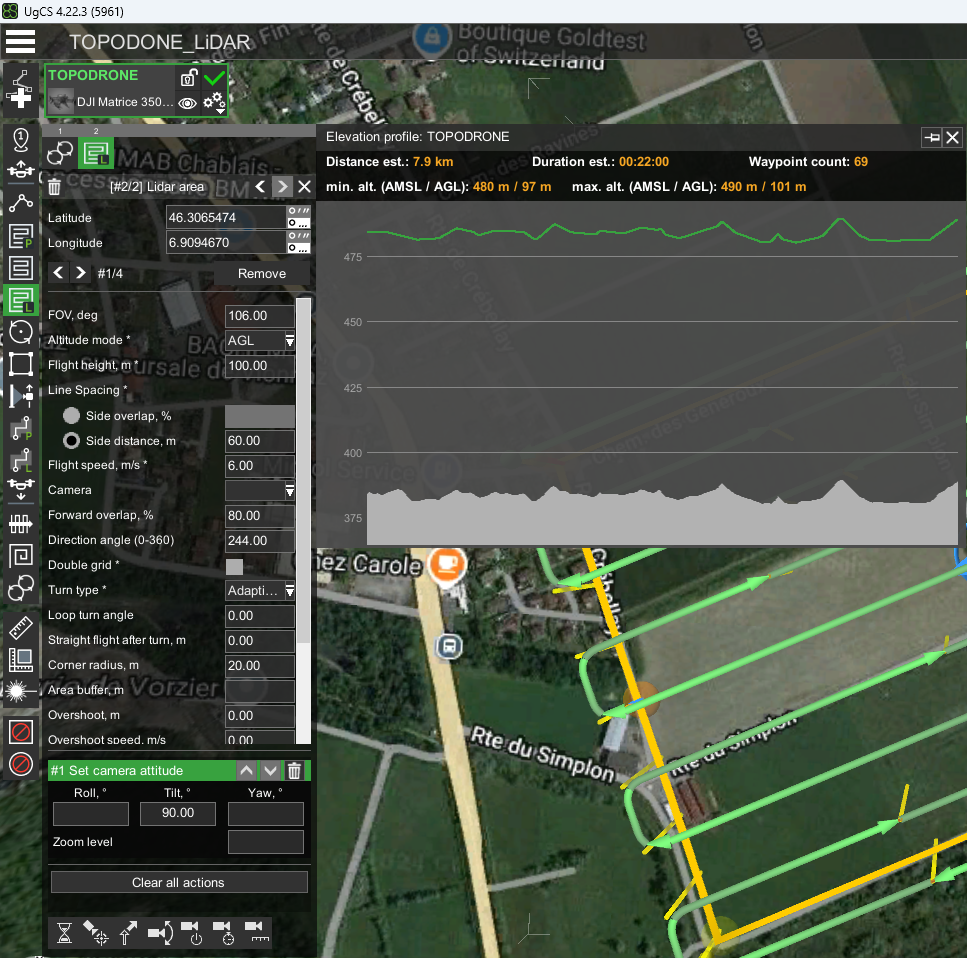
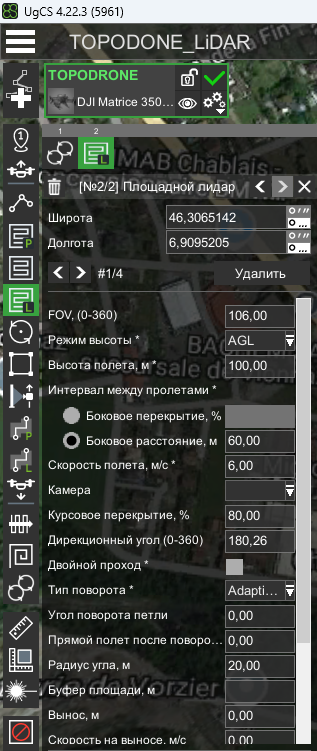
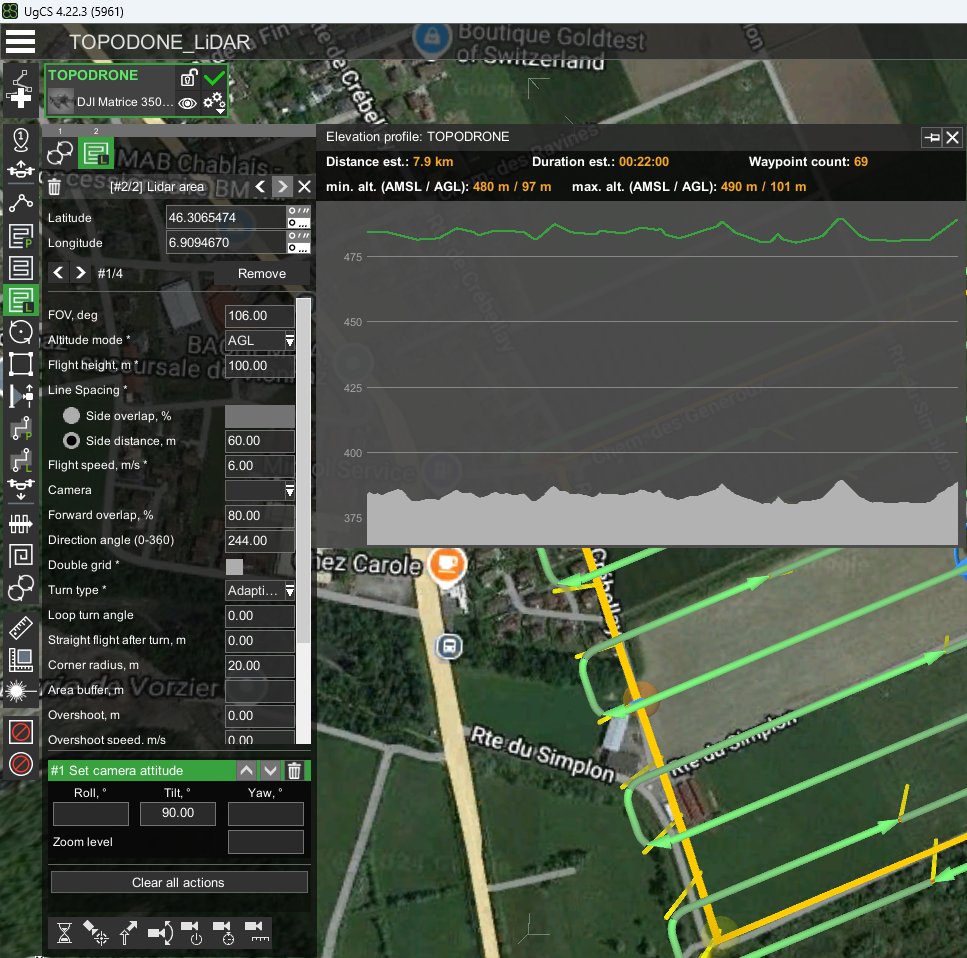
- Используюя инструмент "Площадной LiDAR" установить зону выполнения ВЛС

- Установить параметр "FOV" на значение 106 градусов
- Установить параметр "Режим высоты" на значение AGL или Smart AGL для огибания рельефа
- Установить параметр "Боковое перекрытие, %" на значение не менее 30%, рекомендуется 40-60%
- Установить параметр "Высота полёта" в соответствии с рекомендуемыми значениями для модели лазерного сканера
- Установить параметр "Скорость" в диапазоне 3-12 м/с в соответствии с требуемой производительностью и плотностью облака точек
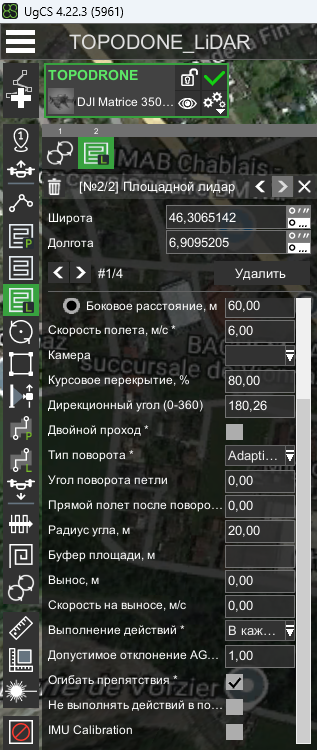
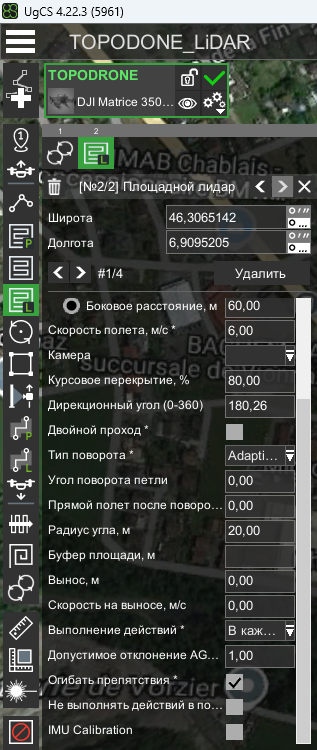
- Установить параметр "Тип поворота" на значение Adaptive Bank Turn
- Снять галочку "IMU Calibration", если она установлена по умолчанию
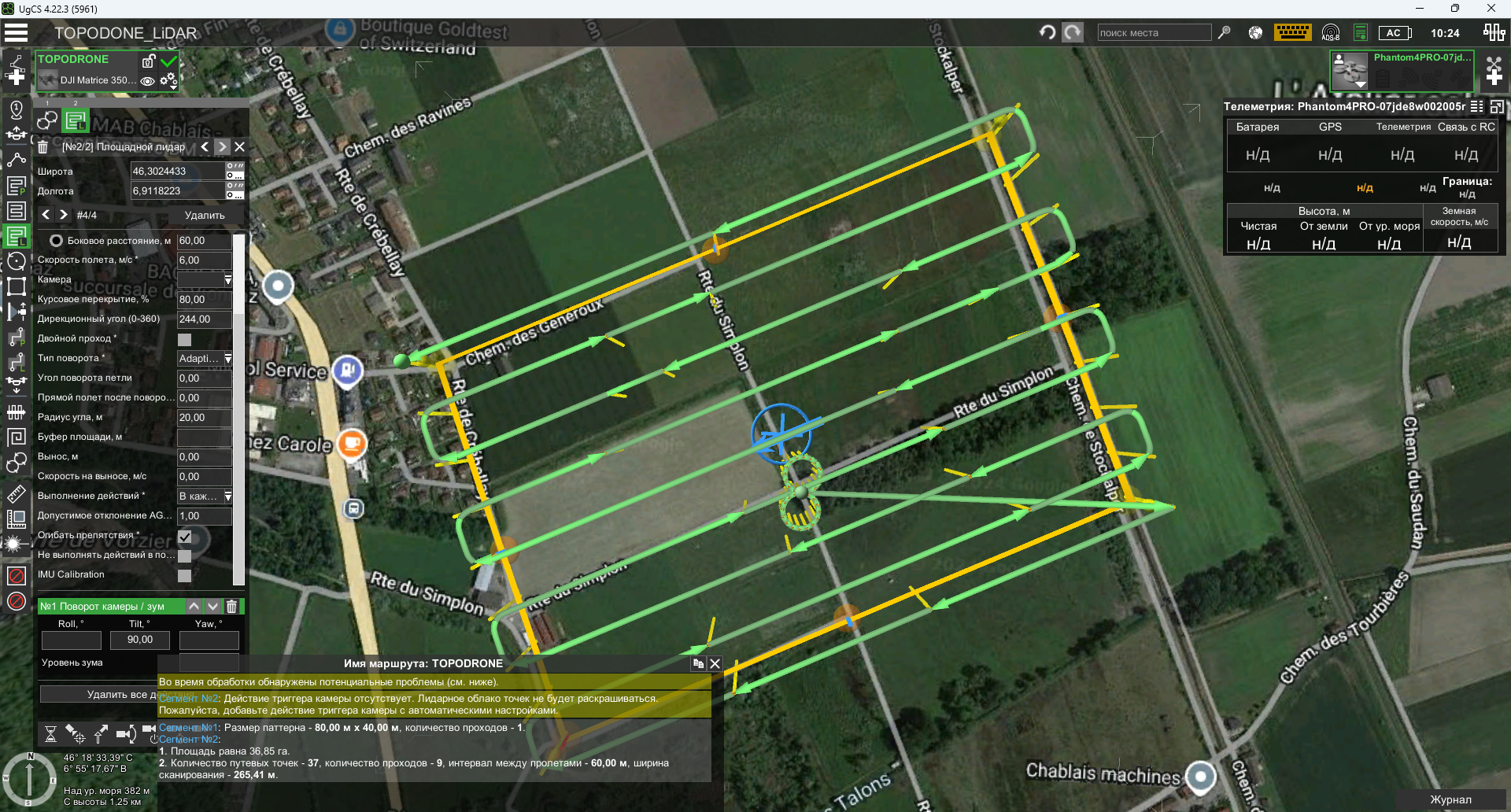
- Установить параметр "Диррекционный угол" так, что бы повороты на углах были прямыми. При необходимости, незначительно передвинуть вершины области. Значение диррекционного угла удобно использовать целочисленным при наличии нескольких маршрутов.
- Остальные параметры оставить по умолчанию.
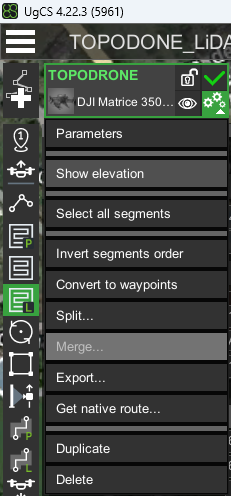
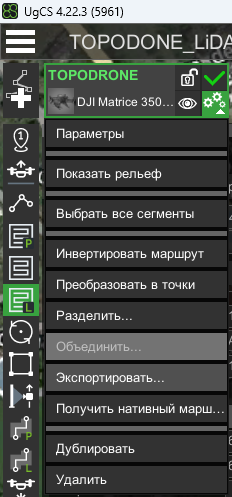
- Нажать на кнопку "параметры" и выбрать "показать маршрут", оценить траекторию полёта относительно рельефа
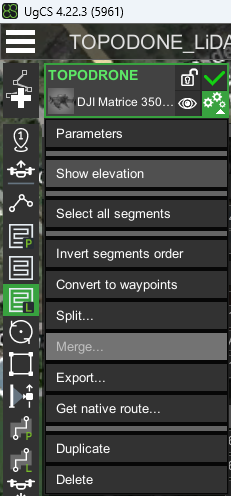
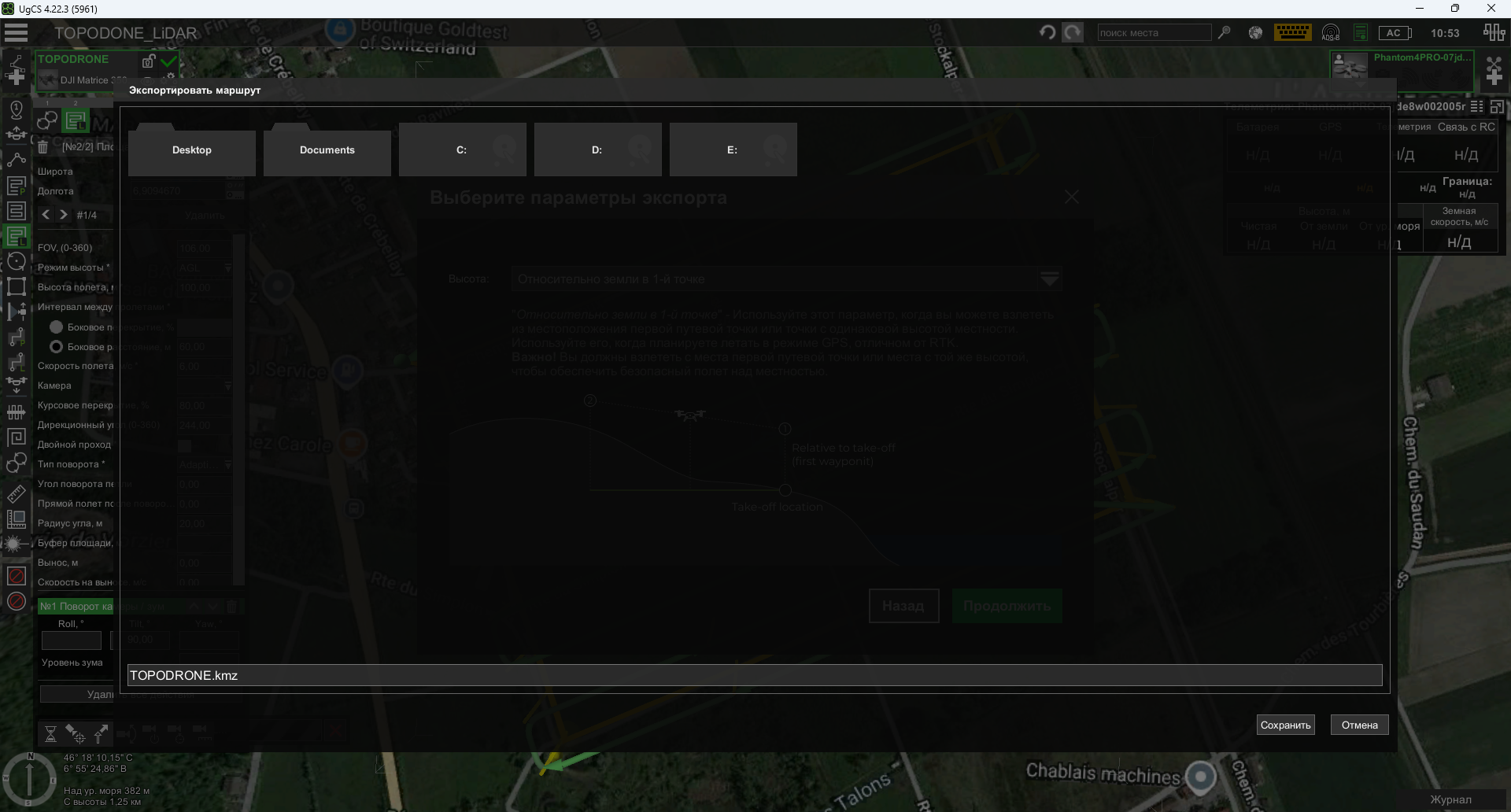
- Нажать на кнопку "параметры" и выбрать "экспортировать" и выбрать опцию "для DJI Pilot 2"
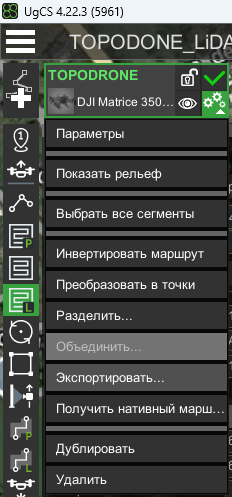

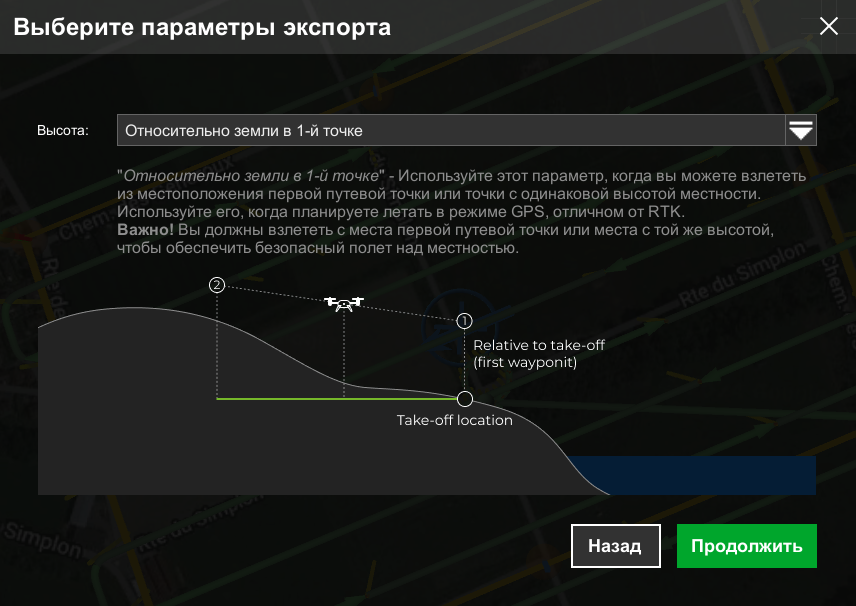
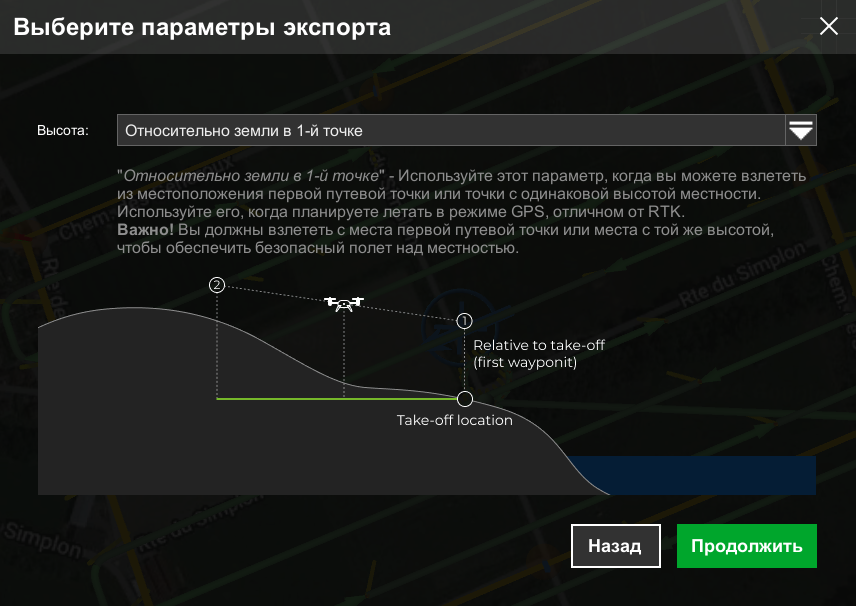
- Для параметра "Высота" выбрать значение "относительно 1-й точки маршрута" и нажать "Продолжить"
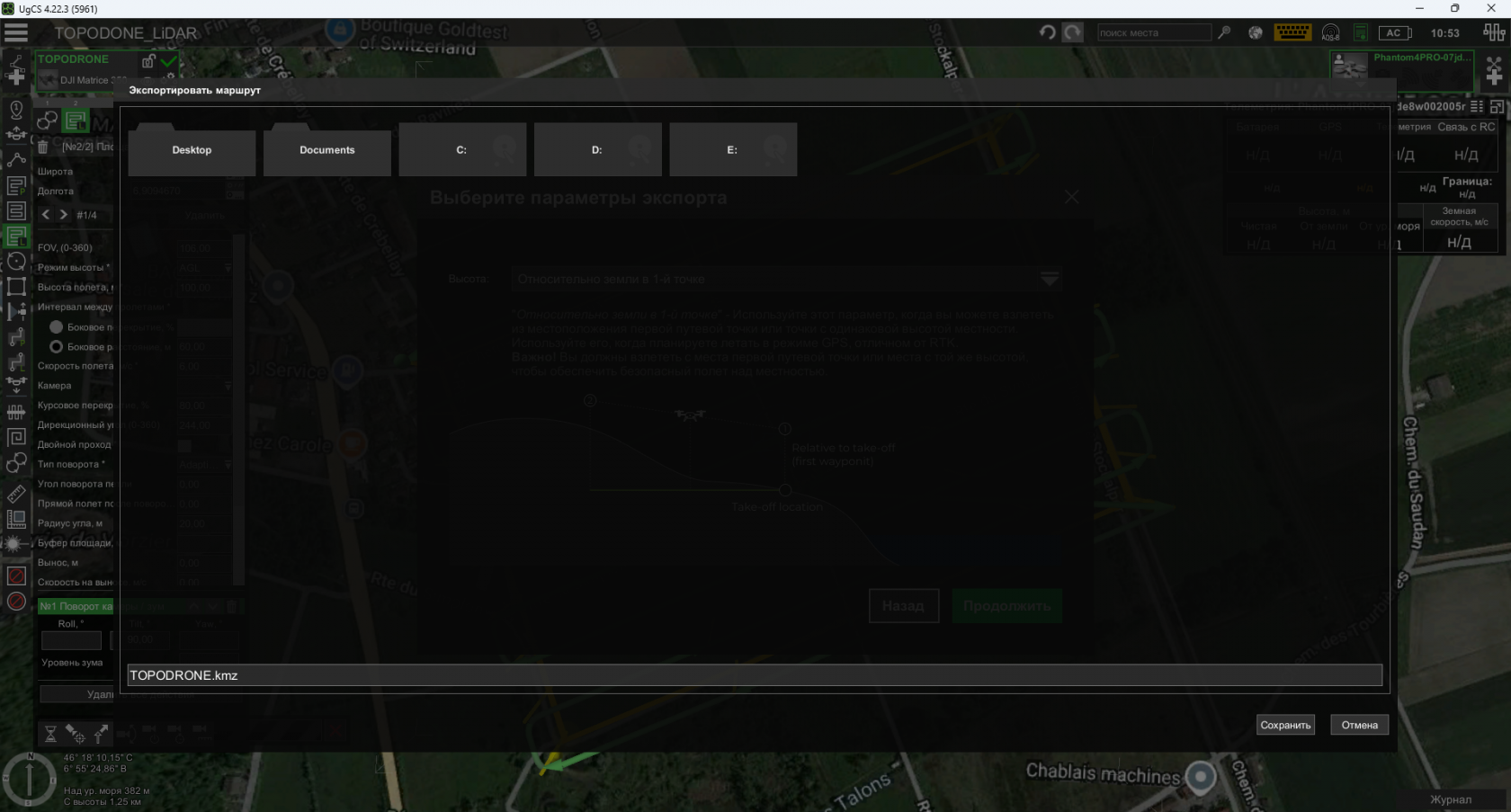
- Сохранить полученный маршрут на карту памяти MicroSD в формате *.kmz
- Вставить карту памяти MicroSD в пульт ДУ DJI M300 RTK или DJI M350 RTK и импортировать маршрут


Скорость и высота полёта дрона напрямую влияют на плотность плотного облака точек лазерного сканирования.
No Comments