
Мобильное Лазерное Сканирование (МЛС)
Лазерный сканер TOPODRONE предназначен для выполнения мобильного лазерного сканирования (MLS). Этот процесс требует минимального количества разрешений для проведения полевых работ. Вам не потребуется получать разрешение на полеты, избегать ограничений воздушного пространства, а также минимизируется риск повреждения оборудования в случае падения дрона.
Мобильное лазерное сканирование может осуществляться двумя способами: с использованием рюкзака TOPODRONE или мобильного автомобильного крепления TOPODRONE. Рюкзак TOPODRONE позволяет разместить лазерный сканер TOPODRONE вместе с внешней GNSS-антенной и блоком питания на операторе. Для достижения более точных результатов при использовании рюкзака TOPODRONE рекомендуется применять транспортное средство, такое как квадроцикл, электросамокат или гироскутер.
При выполнении сканирования с рюкзаком TOPODRONE оператор должен двигаться ровной походкой, минимизируя вертикальные и боковые колебания. Основная задача — поддерживать постоянную скорость и свести вибрации к минимуму.
Основные этапы выполнения мобильного лазерного сканирования:
- Подготовка, настройка и установка оборудования на рюкзак или на мобильное крепление.
- Включение лазерного сканера TOPODRONE и прохождение инициализации (необходим сигнал GNSS).
- Выполнение калибровочного маневра (движение по траектории "бесконечность" или "вперед-назад").
- Проходы с лазерным сканером TOPODRONE по основной зоне съемки вперёд и назад.
- При выполнении длительных сессий (более 30 минут) для повышения качества результата рекомендуется выполнять дополнительные калибровочные маневры каждые 30 минут без выключения лазерного сканера TOPODRONE.
- Передача данных и/или отключение лазерного сканера TOPODRONE
Общие рекомендации по мобильному лазерному сканированию:
- Перед началом сканирования проверьте углы отсечки лазерного сканера TOPODRONE, как указано в соответствующем разделе инструкции.
- Необходимо наличие файла базовой станции, включающего все время работы лазерного сканера TOPODRONE.
- Сигнал GNSS должен быть стабильным и качественным на протяжении всей траектории сканирования. Для обработки данных в программе TOPODRONE Post Processing требуется качественный сигнал GNSS.
- При использовании фильтра TopoSLAM GNSS-сигнал должен быть высокого качества как при калибровке лазерного сканера TOPODRONE, так и при съемке для корректной последующей калибровки углов смещения.
- При движении с лазерным сканером TOPODRONE старайтесь поддерживать стабильную скорость без резких маневров и рывков. Оптимальная скорость для достижения наилучших результатов составляет от 10 до 60 км/ч.
- При использовании автомобильного крепления рекомендуется применять автомобили с функцией круиз-контроля для поддержания стабильной скорости. Мягкая подвеска автомобиля, круиз-контроль и ровная дорога помогут минимизировать вибрации для достижения лучших результатов.
- Неровные дороги, рывки, хаотичные повороты, вибрации двигателя и жесткая подвеска, а также временная потеря сигнала GNSS могут ухудшить качество получаемых данных.
- Продолжительность сессий сканирования не рекомендуется более 30 минут, так как длительные сессии могут значительно увеличить время постобработки и ухудшить качество результатов. В случае необходимости, рекомендуется разделить большую зону съемки на участки, которые можно сканировать за 30 минут.
- Сканирование должно проводиться с обеих сторон объекта (спереди и сзади), как указано в схеме.
- Для повышения качества калибровки углов несоосности на этапе пост-обработки, рекомендуется наличие в месте съемки вертикальных объектов, таких как столбы, стены, заборы и т.п.
Схемы траекторий мобильного лазерного сканирования:
|
|
|
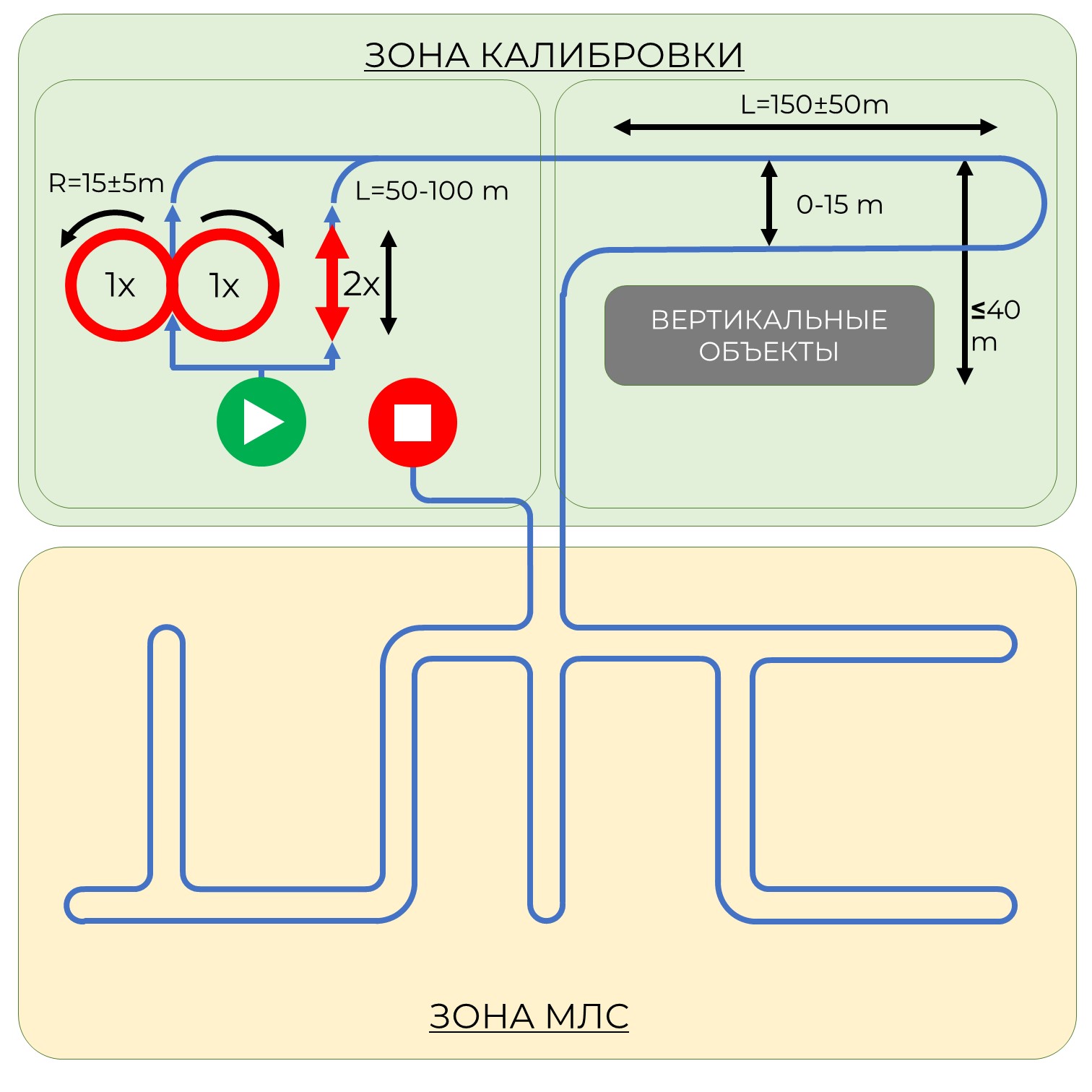
| 1. Зоны работы лазерного сканера TOPODRONE | 2. Общий вид на траекторию оператора |
|
|
|
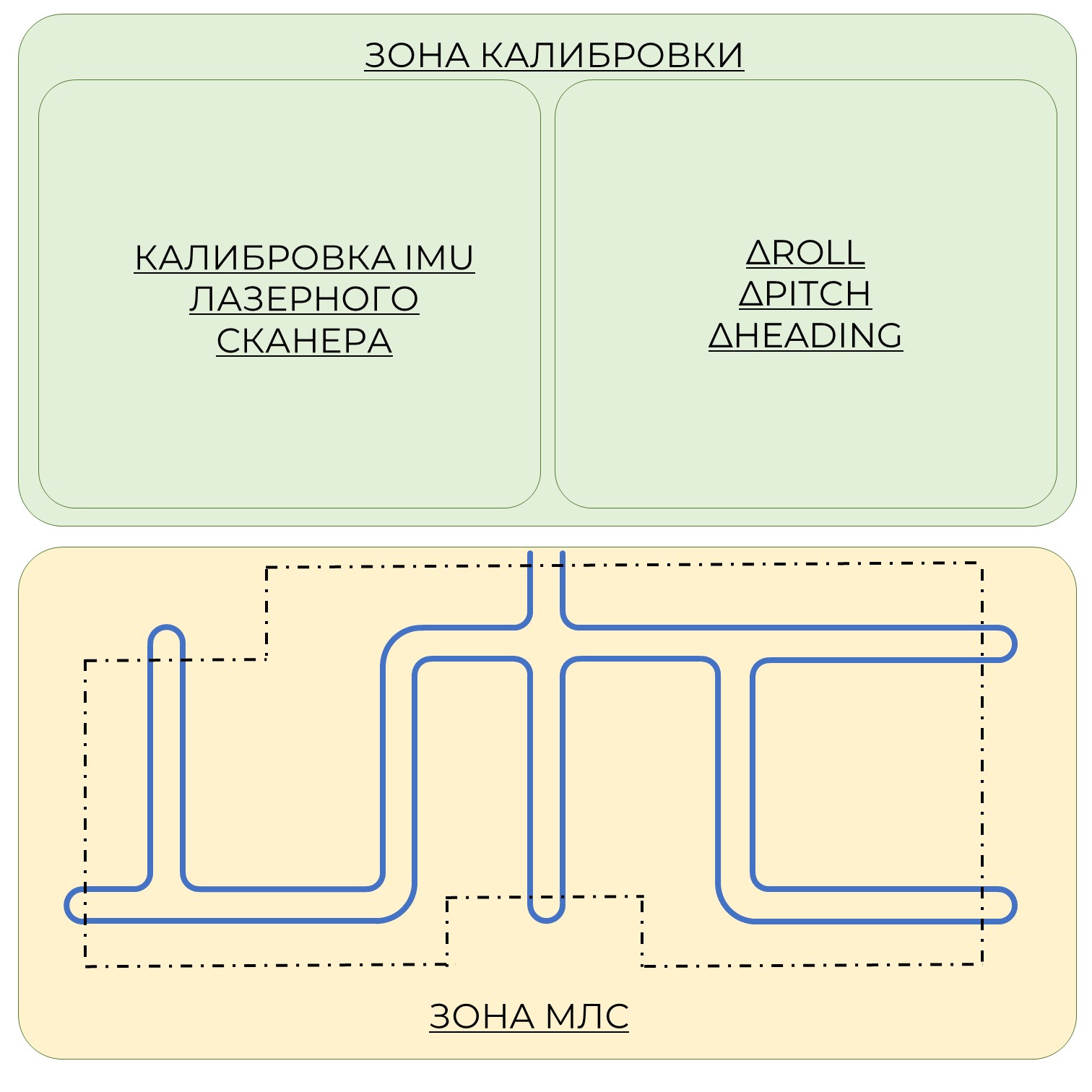
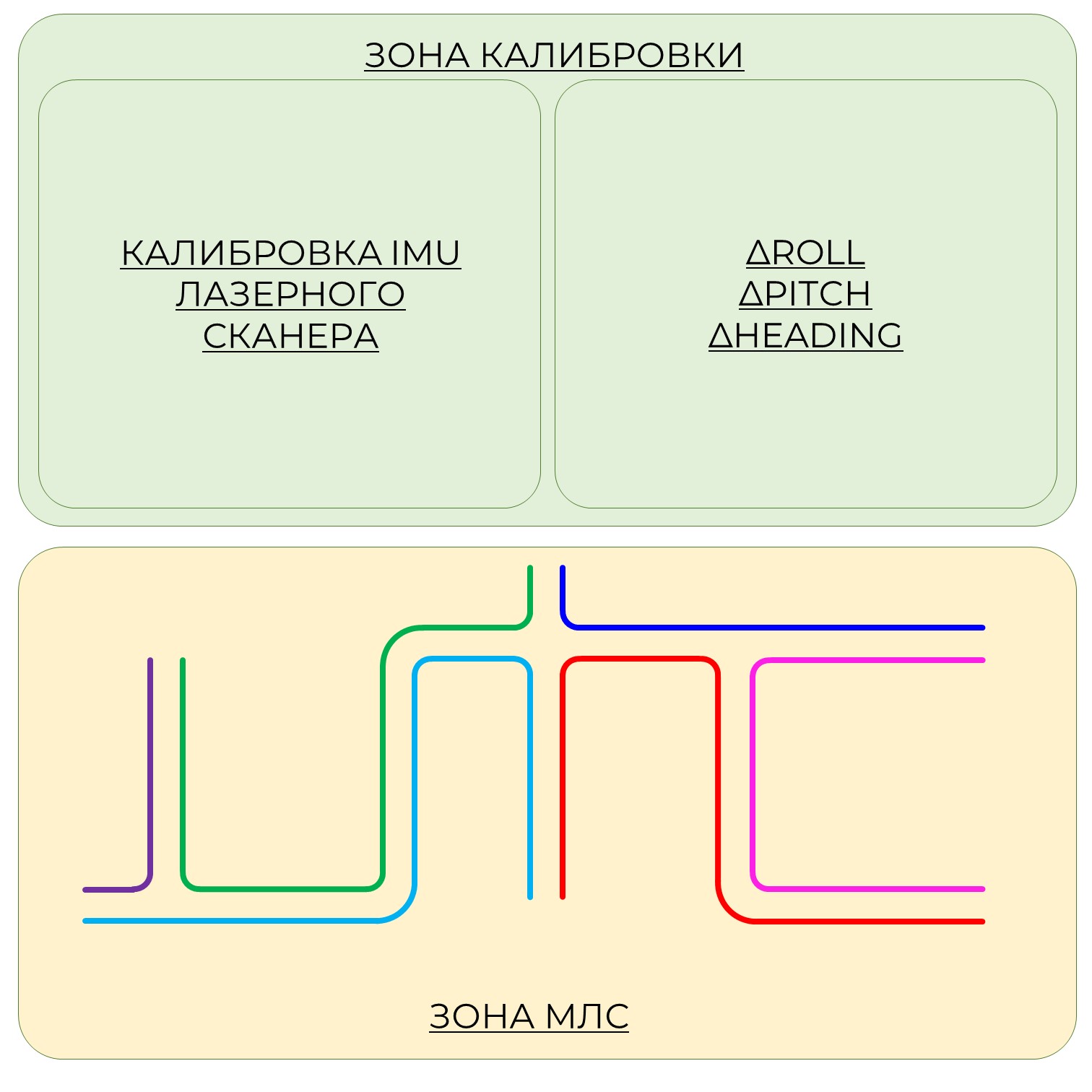
| 3. Отсекание скруглений на поворотах (этап постобработки) | 4. Получение параллельных сканов (этап постобработки) |
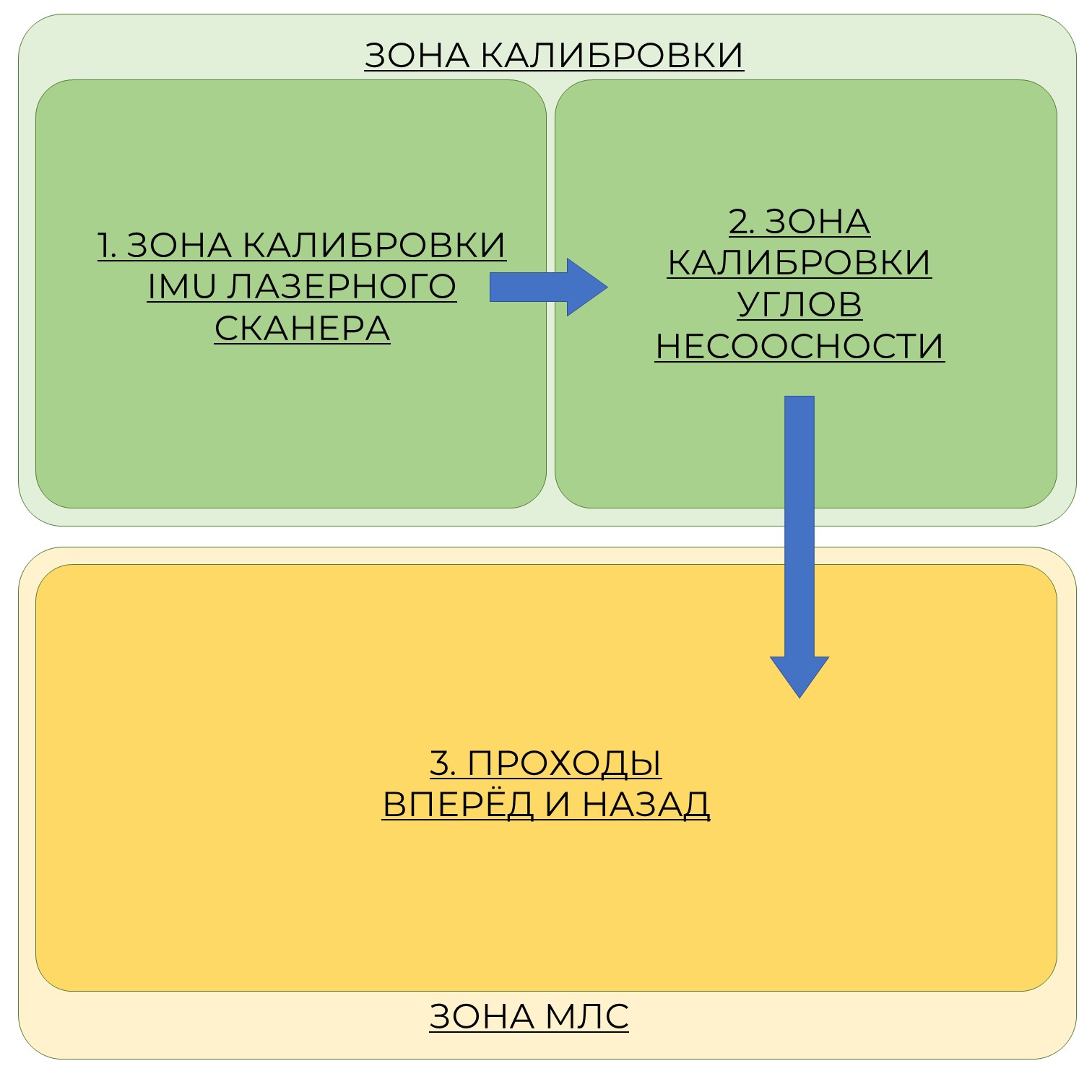
Мобильное лазерное сканирование условно разделяется на 2 этапа, на первом этапе мы выполняем калибровку лазерного сканера TOPODRONE, а на втором этапе мы выполняем сканирование объекта.
Выполните проезд с постоянной скоростью 20-30 км/ч вперед на дистанцию 50-100 метров с возвращением в исходную точку задним ходом с той же скоростью. Повторить данный этап 2-4 раза. Даный этап необходим для точного позиционирования лазерного сканера TOPODRONE в пространстве.
После завершения проездов, калибровка выполнена, можно приступать к выполнению основного задания.
После завершения проездов, калибровка выполнена, можно приступать к выполнению основного задания.
При выполнение основного этапа сканирования необходимо обеспечить как минимум 2 проезда по участку работ, при этом перекрытие между проездами должно составлять не более 15 метров (чем больше перекрытие тем проще программе будет рассчитать углы несоосности).
Технология расчета углов несоостности сканов в пост обработке предусматривает наличие вертикальных объектов, поэтому если на участке сканирования вертикальные объекты отсутствуют или их количество минимально необходимо дополнить работы участком с вертикальными объектами для расчета углов несоосности.
Рекомендуется выполнять сканирование в прямом и обратном направление чтобы объекты сканировались с обеих сторон (спереди и сзади), если технически так сделать нельзя то допускается сканирование в 2 проезда в одном направление, однако стоит учитывать, что в этом случае плотность покрытия объекта может быть не полной.
Всегда выполняйте проезды с небольшим запасом т.к. в пост обработки повороты будут обрезаны.
No Comments