Примечания к выпуску
Условия работы ПО после окончания срока техподдержки
Функционирование дистрибутива TOPODRONE Post Processing зависит от актуального статуса технической поддержки. Если срок оплаченной поддержки истек до даты выпуска новой версии ПО, пользователь не сможет использовать данный дистрибутив. Для продолжения работы доступны следующие варианты:
- Продление техподдержки – активация доступа к последним версиям ПО.
- Использование совместимых дистрибутивов – установка версий, выпущенных до окончания срока действующей поддержки.
Соответствующие дистрибутивы доступны для загрузки по ссылке: TOPODRONE Software Distributor
TPP v.1.5.3.0
11 ноября 2025 года.
Общие улучшения
- Визуализация.
- Исправлена ошибка, связанная с некорректной инициализацией координат точки взлета, в результате которой её местоположение по умолчанию определялось как Северный полюс или точка с нулевыми координатами (0°, 0°).
- Производительность.
- Все расчеты связанные с обработкой облака точке лазерного сканирования теперь выполняются в потоковом режиме, благодаря чему остутствует ограничение на объем загружаемых данных.
- Добавлена поддержка новой модификации SWIR-камеры Q.Fly Water для расчета показателя относительного содержания влаги в почве и листьях растений.
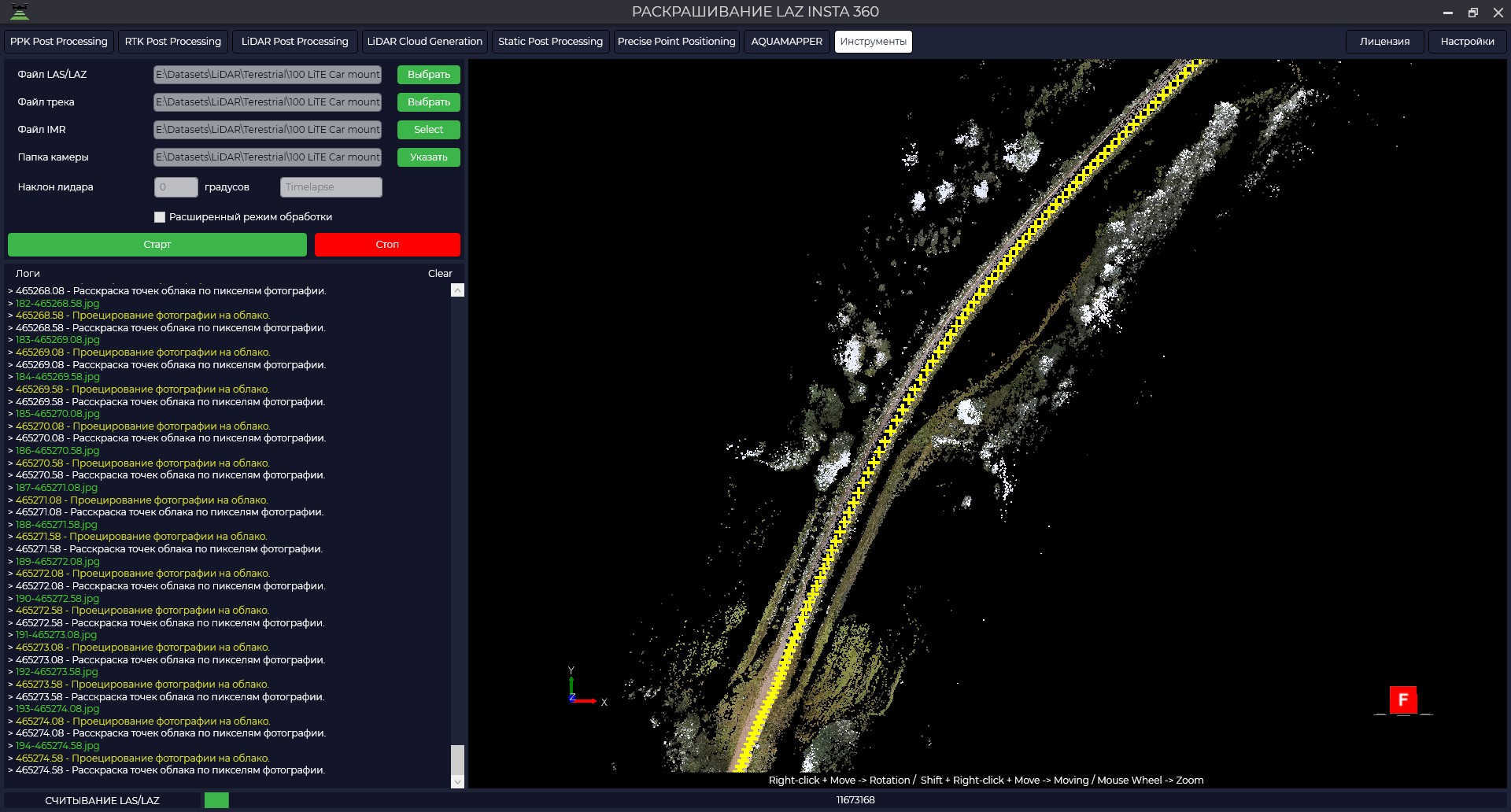
- Раскрашивание LAS/LAZ INSTA 360
- Инструмент создан для раскрашивания облака точек с камеры Insta 360 при выполнении МЛС и создания геопривязанных панорам.
- Восстановление IMR.
- Инструмент позволяет выполнить расчет траектории движения лазерного сканера при кратковременных потерях ГНСС данных.
- Инструмент позволяет выполнить расчет траектории движения лазерного сканера при кратковременных потерях ГНСС данных.
TPP v.1.5.2.1
27 июля 2025 года.
Общие улучшения
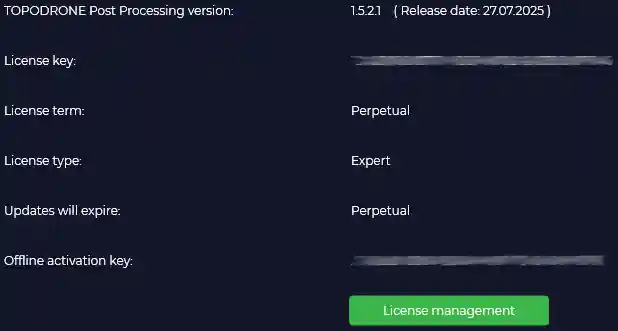
- Лицензирование.
- Добавлено отображение даты релиза на странице информации о лицензии.
- Производительность.
- Ускорена загрузка проектов (PRJ) при запуске (оптимизация для ~6000 файлов);
- Улучшена скорость визуализации данных (траектории, фото, временные метки) во всех модулях.
- Данные и форматы:
- Обновлен файл антенн igs20_2353.atx;
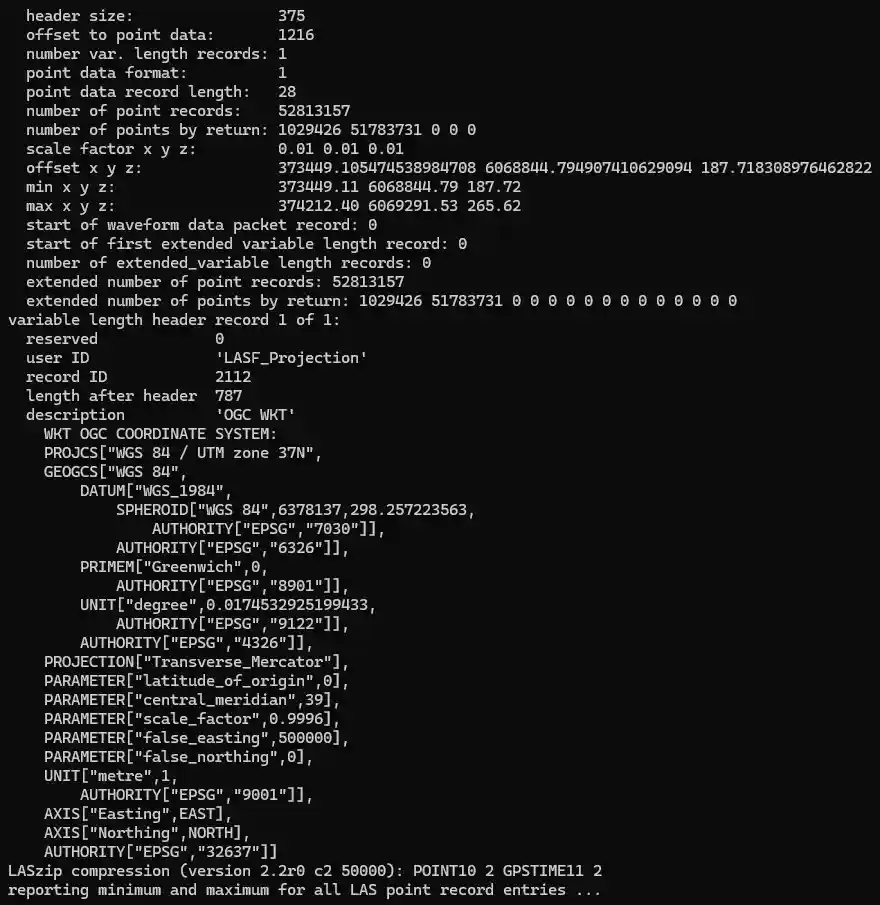
- Интегрирована утилита lasinfo (LAStools) для проверки заголовков LAS/LAZ;
- В заголовки LAS/LAZ добавлена информация о системе координат;
-
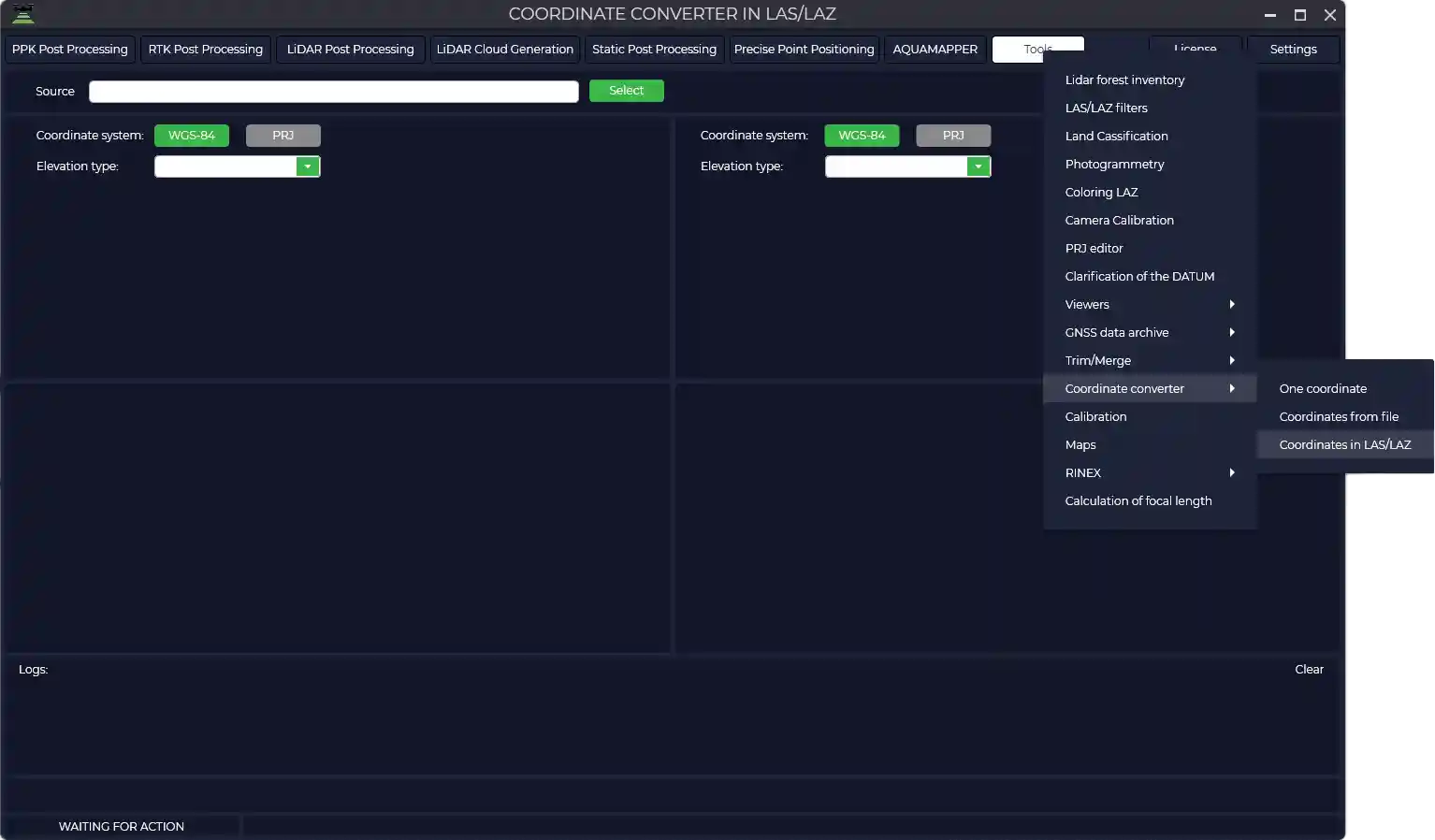
- Добавлена возможность конвертации облаков точек (.LAS/.LAZ) между СК (в Tools).
- ГНСС-обработка:
- Добавлена опция отключения группировки GPS при расчете траекторий;
- Удалена фильтрация частот (L1/L2...) — теперь используются все доступные частоты.
- Логирование
- Ведение журнала обработки в logs.txt, включая:
- Время активации ровера/базовой станций;
- Количество спутников;
- Используемые частоты;
- Частоту записи данных и др. параметры.
- Ведение журнала обработки в logs.txt, включая:
25/07/2025 18:30:15
Dataset №1:
TPP Version: 1.5.2.1(27.07.2025)
License key: 1348DF06-8777-48CF-A6D8-E4239CA973A0
#Images folder: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm Orsha\Photo RGB
GNSS file: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm Orsha\Photo RGB\2023-07-05_11-01-12.ubx
Start time: 05/07/2023 11:01:31 UTC
End time:05/07/2023 11:26:52 UTC
Sampling Rate: 0.1 s (≈ 10 Hz)
Observed measurement types:
G (GPS): C1C D1C L1C S1C C2X D2X L2X S2X
R (GLONASS): C1C D1C L1C S1C C2C D2C L2C S2C
E (Galileo): C1X D1X L1X S1X C7X D7X L7X S7X
C (BeiDou): C2I D2I L2I S2I C7I D7I L7I S7I
Number of satellites observed:
Min: 29
Average: 40.6
Max: 42
Epochs : 15208 of 15208 expected ( 100.00% complete )
Number of photos: 304
Number of events: 304
Drone model: TOPODRONE P61+PPK+DJI Matrice 300
Forward/backward offset: 0.074
Left/Right offset: 0.022
Antenna height: 0.362
#Coordinate system: World-WGS 84-UTM-zone 35N (m) EPSG 32635
Geoid model: Ellipsoid WGS-84
#Base station: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm Orsha\ReachGeoGor_raw_20230705105548.obs
Start time: 05/07/2023 10:56:06 UTC
End time:05/07/2023 12:52:11 UTC
Sampling Rate: 1 s (≈ 1 Hz)
Observed measurement types:
G (GPS): C1C D1C L1C S1C C2X D2X L2X S2X
R (GLONASS): C1C D1C L1C S1C C2C D2C L2C S2C
E (Galileo): C1X D1X L1X S1X C7X D7X L7X S7X
S (SBAS): C1C D1C L1C S1C
C (BeiDou): C2I D2I L2I S2I C7I D7I L7I S7I
Number of satellites observed:
Min: 40
Average: 42.6
Max: 46
Epochs : 6966 of 6966 expected ( 100.00% complete )
North: 6045511.967295254
East: 701922.4288487637
Height: 228.738
Antenna height: 1.834
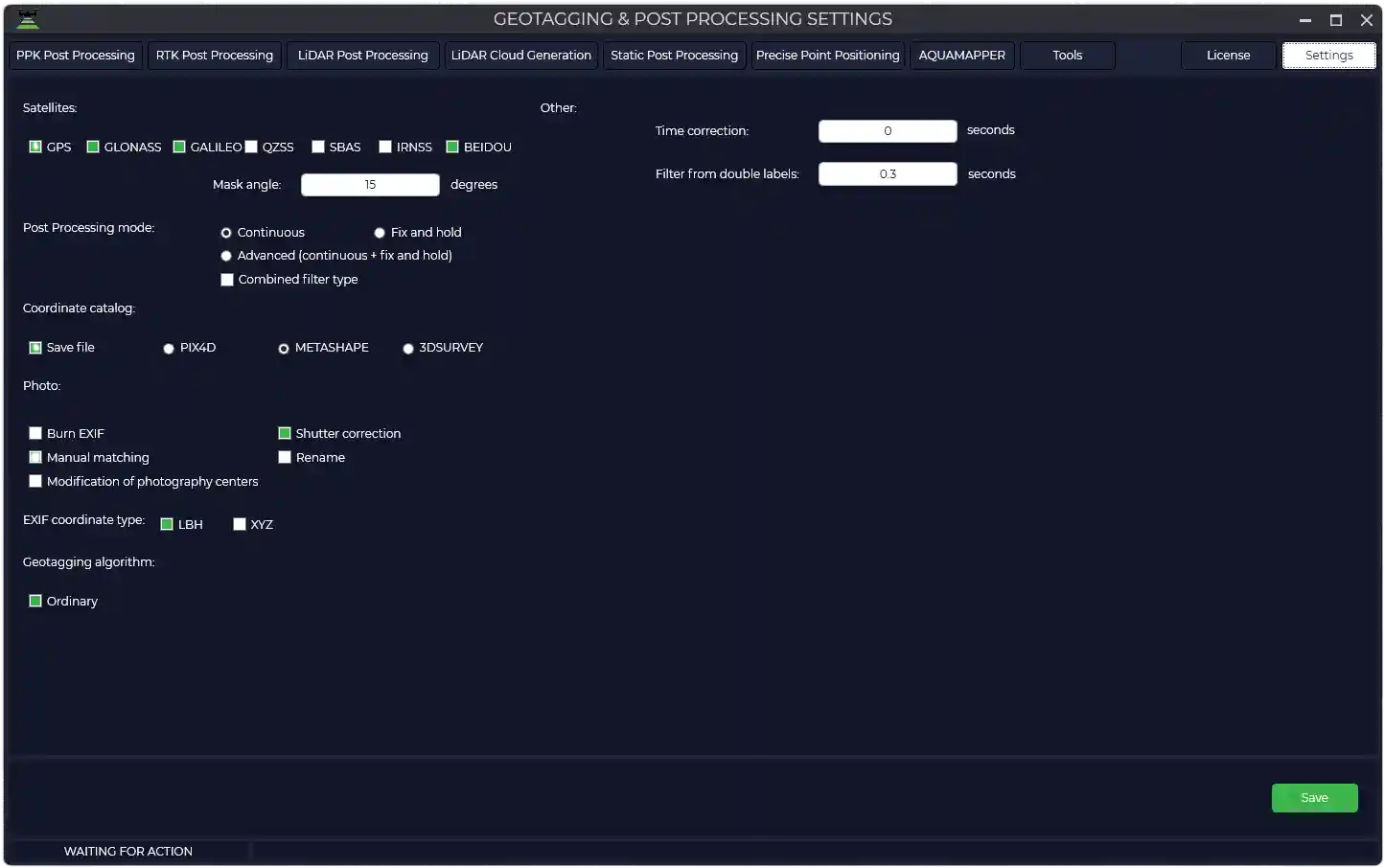
#Settings
Satellites: GPS GLONASS GALILEO BEIDOU
Mask angle: 15
Post Processing mode: Continuous / [ ] Combined filter type
Coordinate catalog: [x] Save file: Metashape
Photo: [ ] Burn EXIF
[x] Shutter correction
[x] Manual matching
[ ] Rename Photo
[ ] Modification of photography centers
EXIF coordinate type: [ ] LBH [x] XYZ
Geotagging algorithm: [x] Ordinary
[ ] Increase time weight
[ ] Increase weight of coordinates
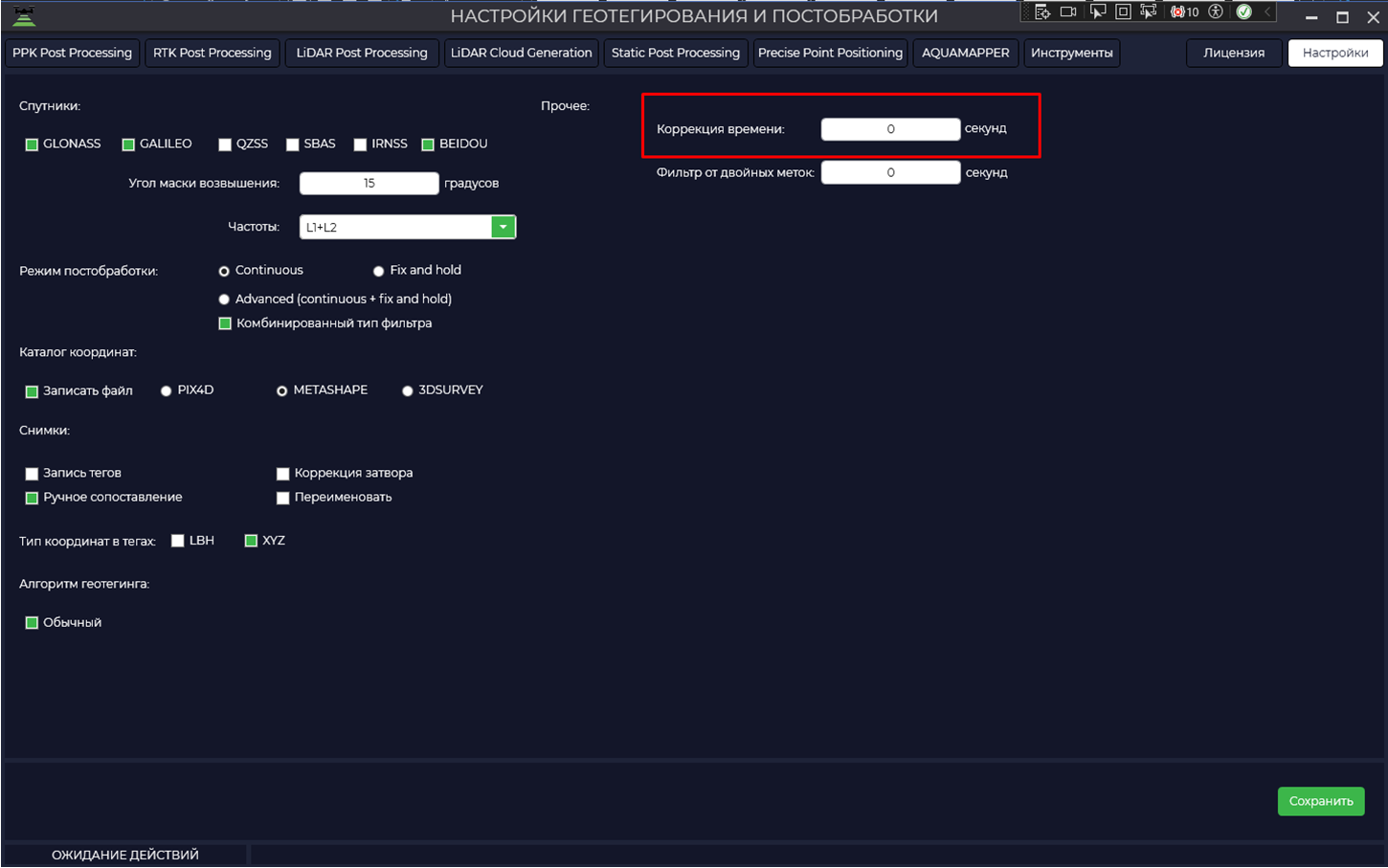
Time correction: 0 seconds
Filter from double labels: 0.3 secondsPPK Post Processing
- Добавлена поддержка камеры TOPODRONE Q.FLY.
RTK Post Processing
- Коррекция центра фотографирования для DJI Matrice 4E по офсетам из файла MRK;
- Добавлена обработка данных с DJI Mavic 3 Multispectral.
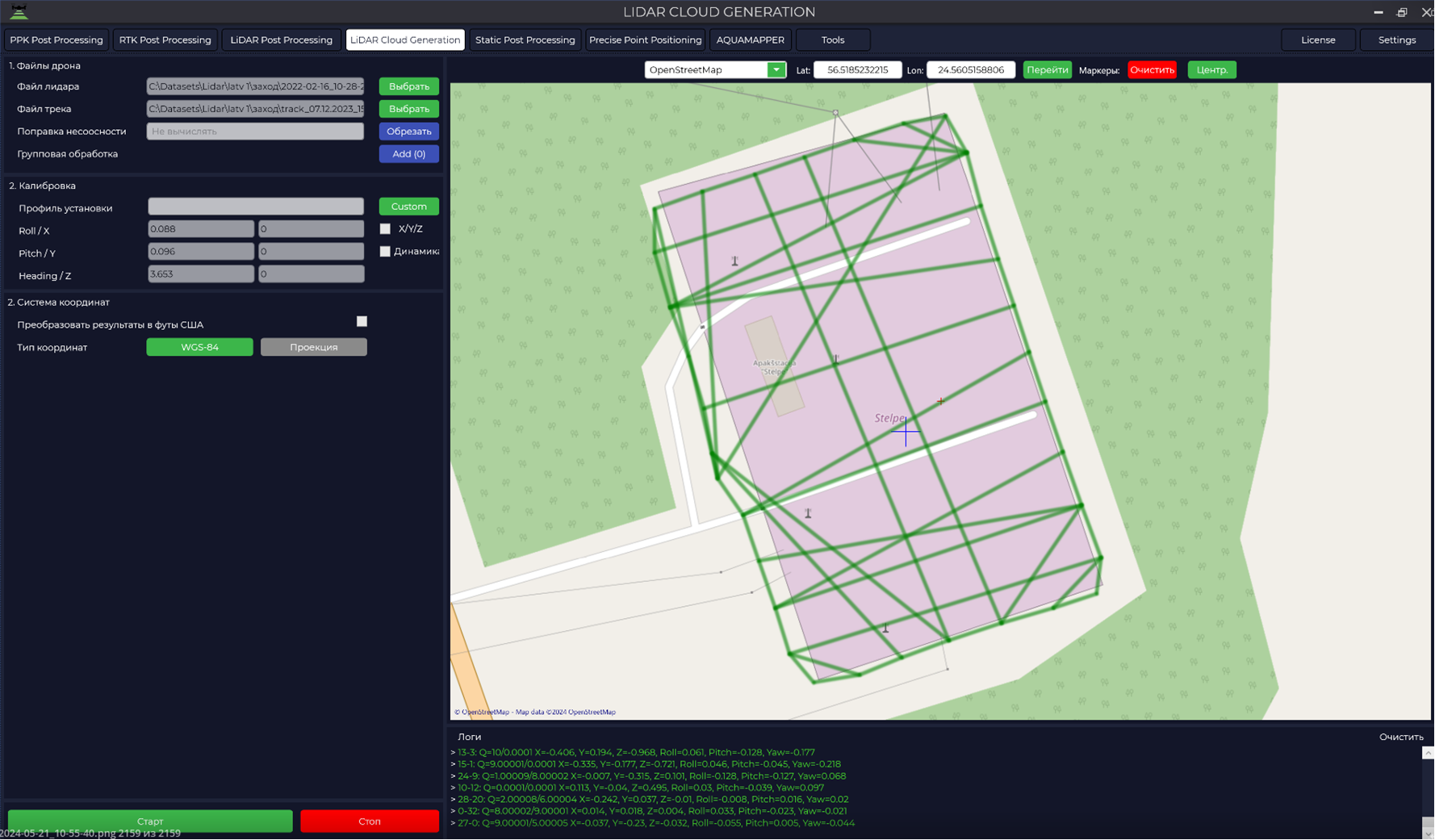
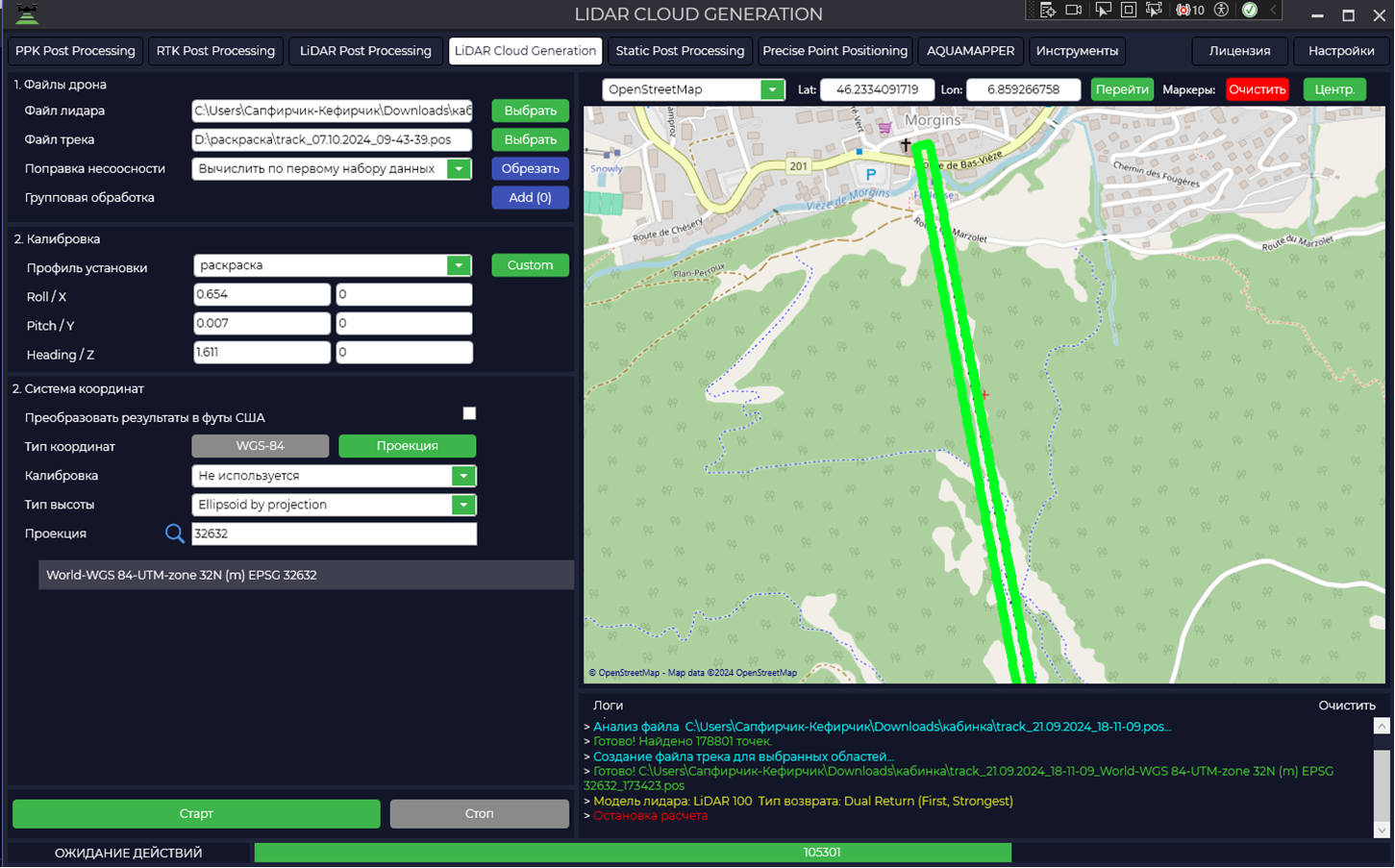
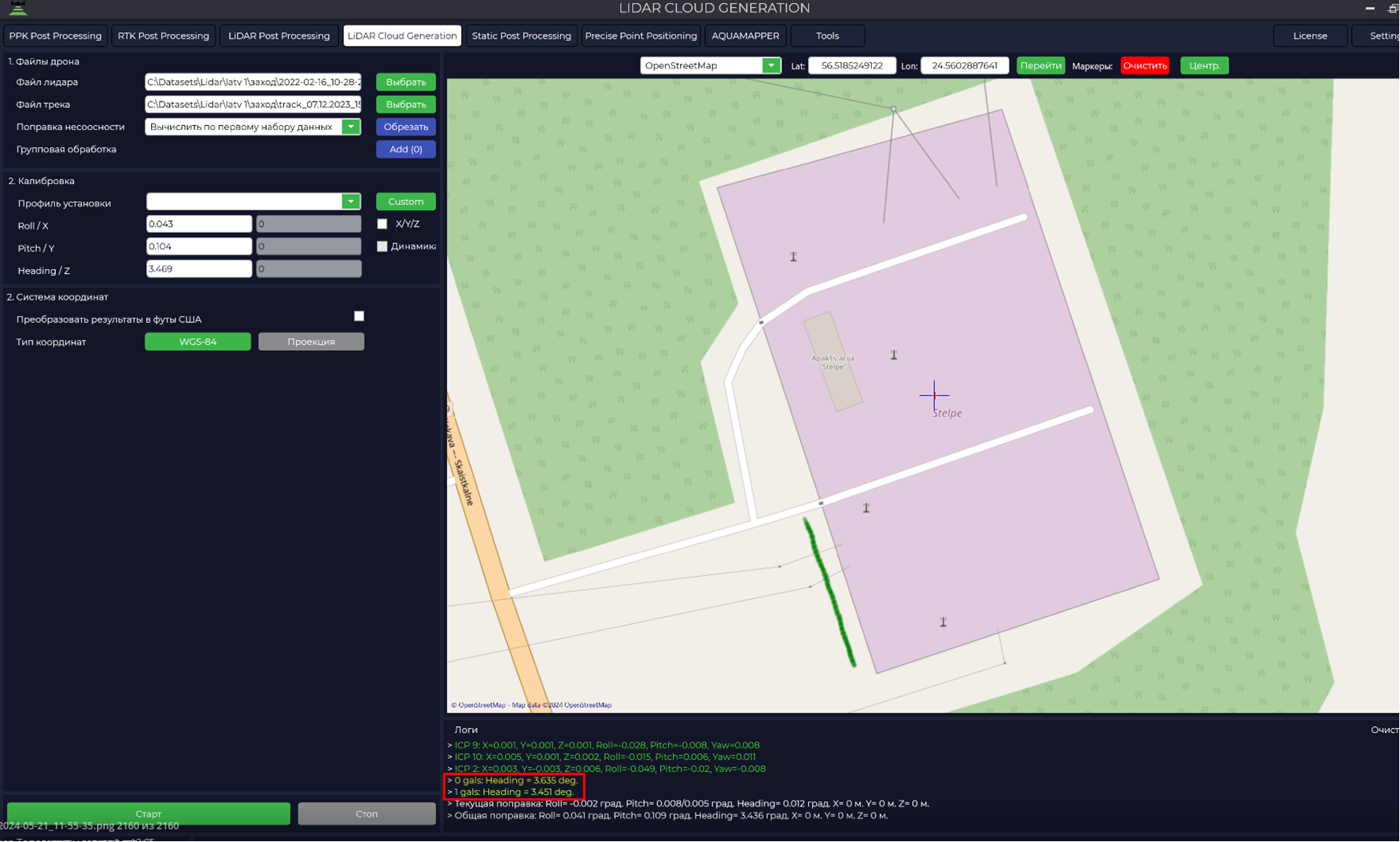
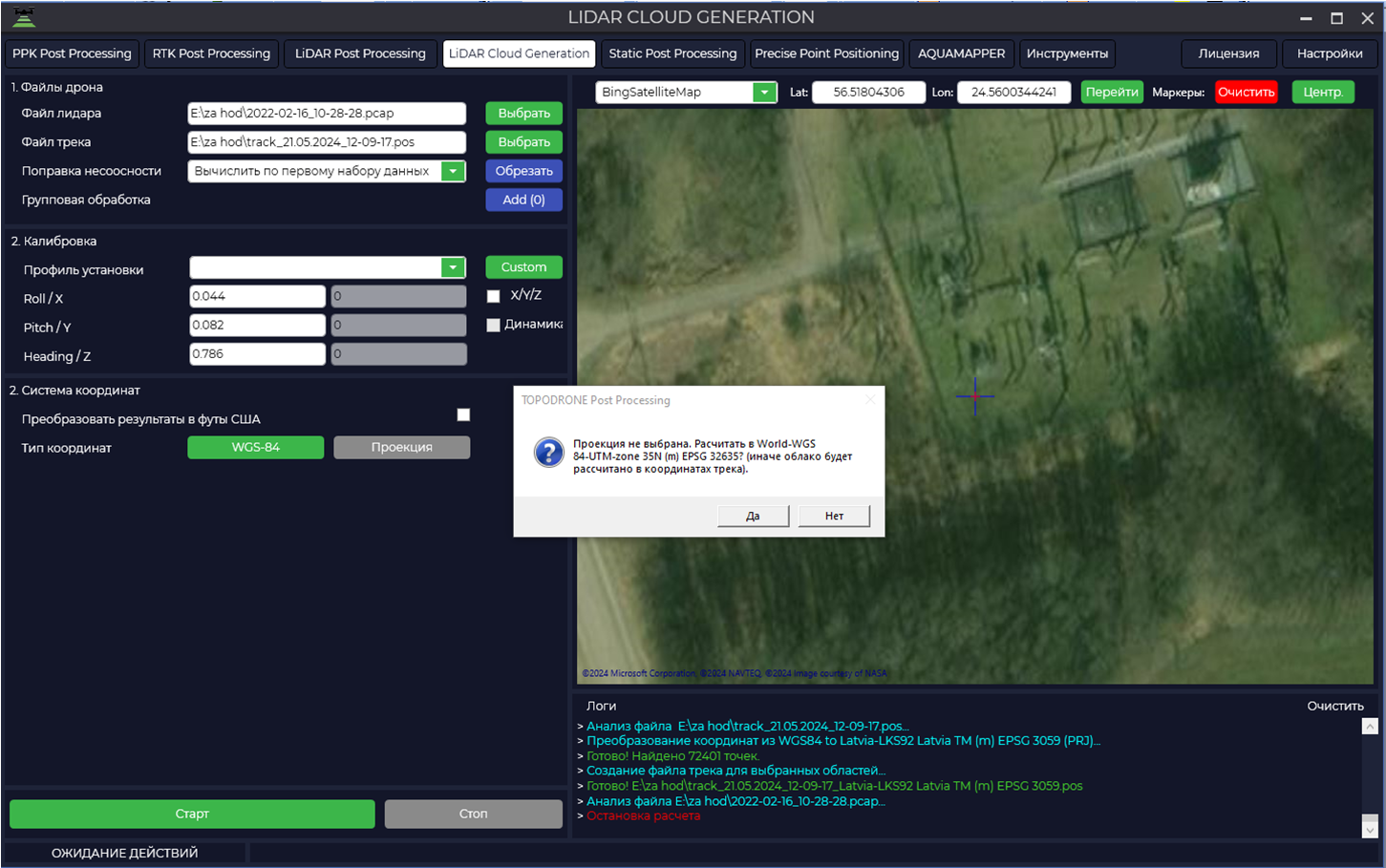
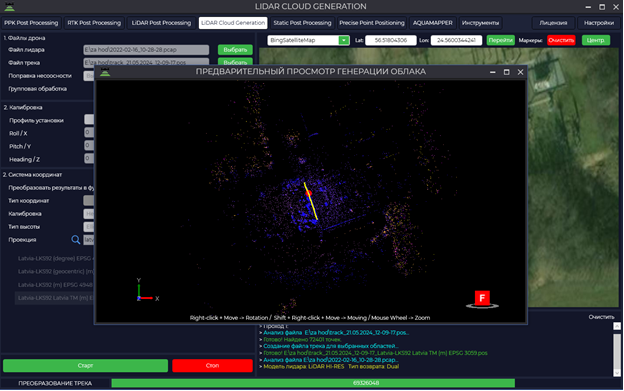
LiDAR Cloud Generation
- Значительно ускорен расчет калибровочных углов;
- Новый алгоритм калибровки для мобильного лазерного сканирования с автомобиля — исключает постобработку в стороннем ПО.
TPP v.1.5.1.4
07 марта 2025 года.
PPK Post Processing
- Добавлена поддержка ГНСС-чипов UNICORE для всех моделей TOPODRONE.
- Добавлены пресеты смещений антенн для:
- TOPODRONE P24 New + PPK + DJI Matrice 350.
- Реализовано автоматическое определение смещений на основе тегов изображений.
- Параметры смещения антенны скрыты из интерфейса (используется автоматический расчет).
RTK Post Processing
- Внедрена автоматическая загрузка навигационных файлов для каждого полета;
- Исправлено отображение окна "Plot" в пакетной обработке.
LiDAR Post Processing
- Исправлено отображение окна "Plot" в пакетной обработке.
LiDAR Cloud Generation
- Добавлена генерация облаков точек в локальных прямоугольных координатах (помимо глобальных СК).
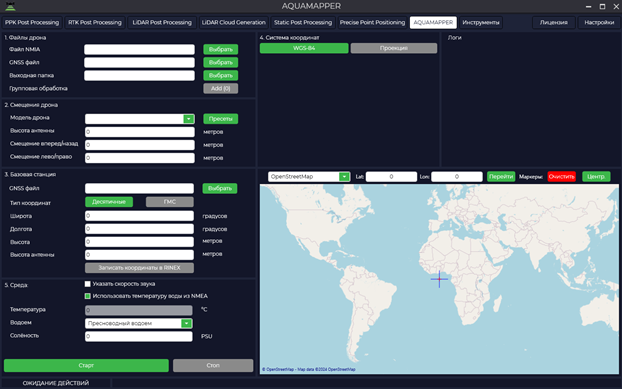
AQUMAPPER
- Автоматизация:
- Добавлен фильтр для удаления точек с нулевой глубиной.
- Форматы данных:
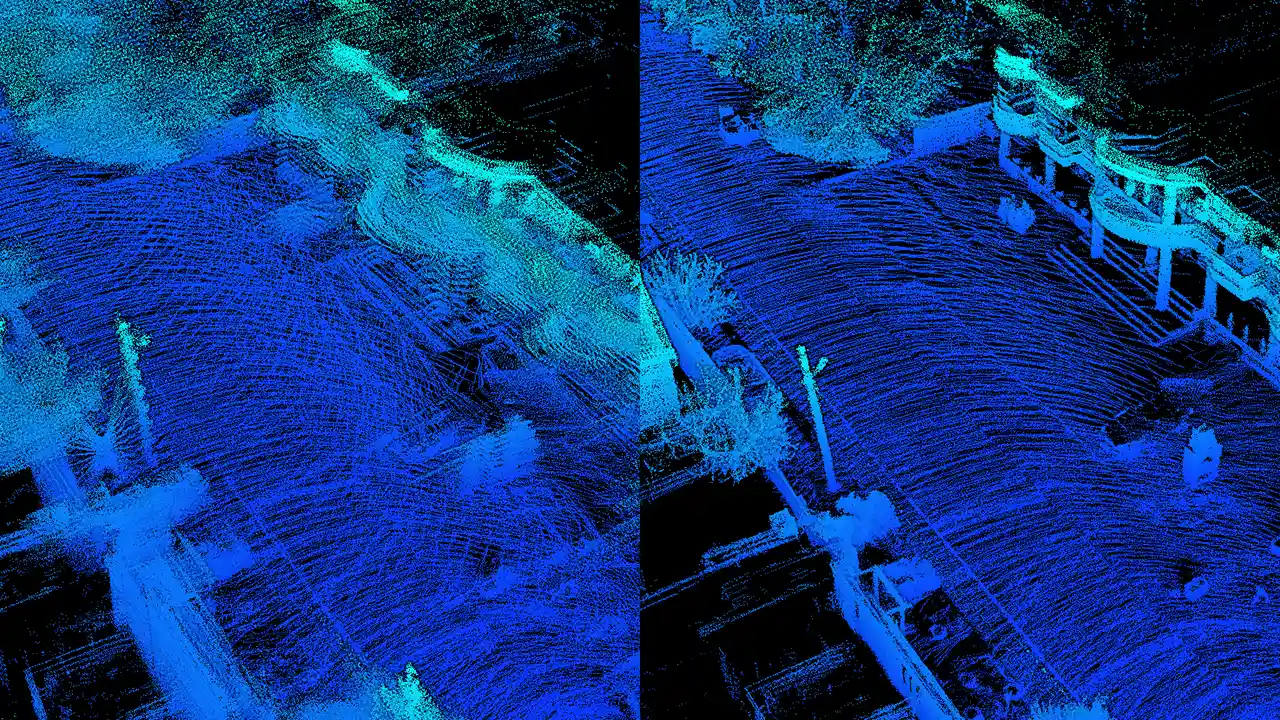
- Реализовано разделение данных двухчастотного сенсора TOPODRONE AQUAMAPPER Next в формате .LAZ:
- 200 кГц — 2-е отражение,
- 450 кГц — 1-е отражение.
- Округление значений в .CSV (координаты X/Y/Z, глубины) до 3 знаков после запятой.
- Реализовано разделение данных двухчастотного сенсора TOPODRONE AQUAMAPPER Next в формате .LAZ:
- Алгоритмы:
- Улучшен расчет температуры для каждого измерения (повышена точность).
TPP v.1.5.1.3
25 января 2025 года.
Общие улучшения
- Валидация времени работы базовой станции и ровера.
- В модулях PPK Post Processing, RTK Post Processing и LiDAR Post Processing реализована автоматическая проверка соответствия времени записи данных ровера и базовой станции. При несоответствии временных интервалов выводится предупреждение: «Время работы базовой станции не соответствует времени работы ровера». Штатная обработка выполняется только при полном соответствии. Для пакетной обработки проверка применяется ко всем файлам роверов.
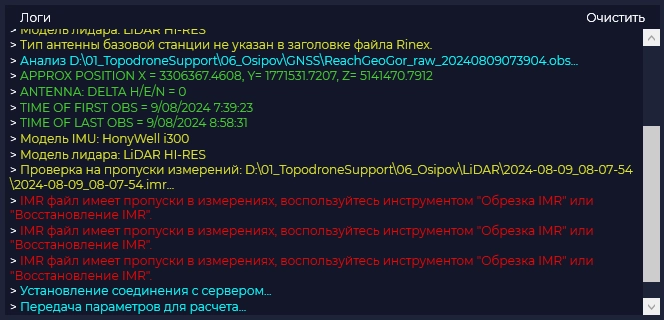
- Проверка на временные пропуски в данных IMU.
- Добавлена автоматическая проверка файлов измерений IMU на наличие пропусков по времени. При обнаружении пропусков выводится предупреждение с рекомендацией: «IMR файл имеет пропуски по времени, воспользуйтесь инструментом "Обрезка IMR"».
- Унификация интерфейса.
- Унифицированы размеры диалоговых окон «Система координат», «Логи» и «Карта» в указанных модулях.
RTK Post Processing
- Исправлена ошибка, при которой в модуле PPK Post Processing, включая режим пакетной обработки, не отображалась кнопка вызова окна «Plot» (глобус).
TPP v.1.5.1.2
28 декабря 2024 года.
Общие улучшения
- Запуск менеджера лицензий из интерфейса.
-
Добавлено диалоговое окно информации о лицензии с возможностью прямого запуска "Менеджера управления лицензиями" из интерфейса TOPODRONE Post Processing.
-
Обновлена базовая библиотека RTKlib (версия j → k).
-
PPK Post Processing
- Реализовано автоматическое приведение временных меток срабатывания затвора камеры к единому формату для исключения эффекта их удвоения. Новый алгоритм обнаруживает пропуски в метках и добавляет отсутствующие данные в поток методом аппроксимации.
RTK Post Processing
- Внесены корректировки в параметры функции «Dynamic». Обновление направлено на снижение ошибки обработки данных при прогнозировании траектории. Новая модель учитывает вероятность внезапного изменения динамических параметров ровера (скорости и направления), что позволяет точнее предсказывать его положение в условиях неопределенности.
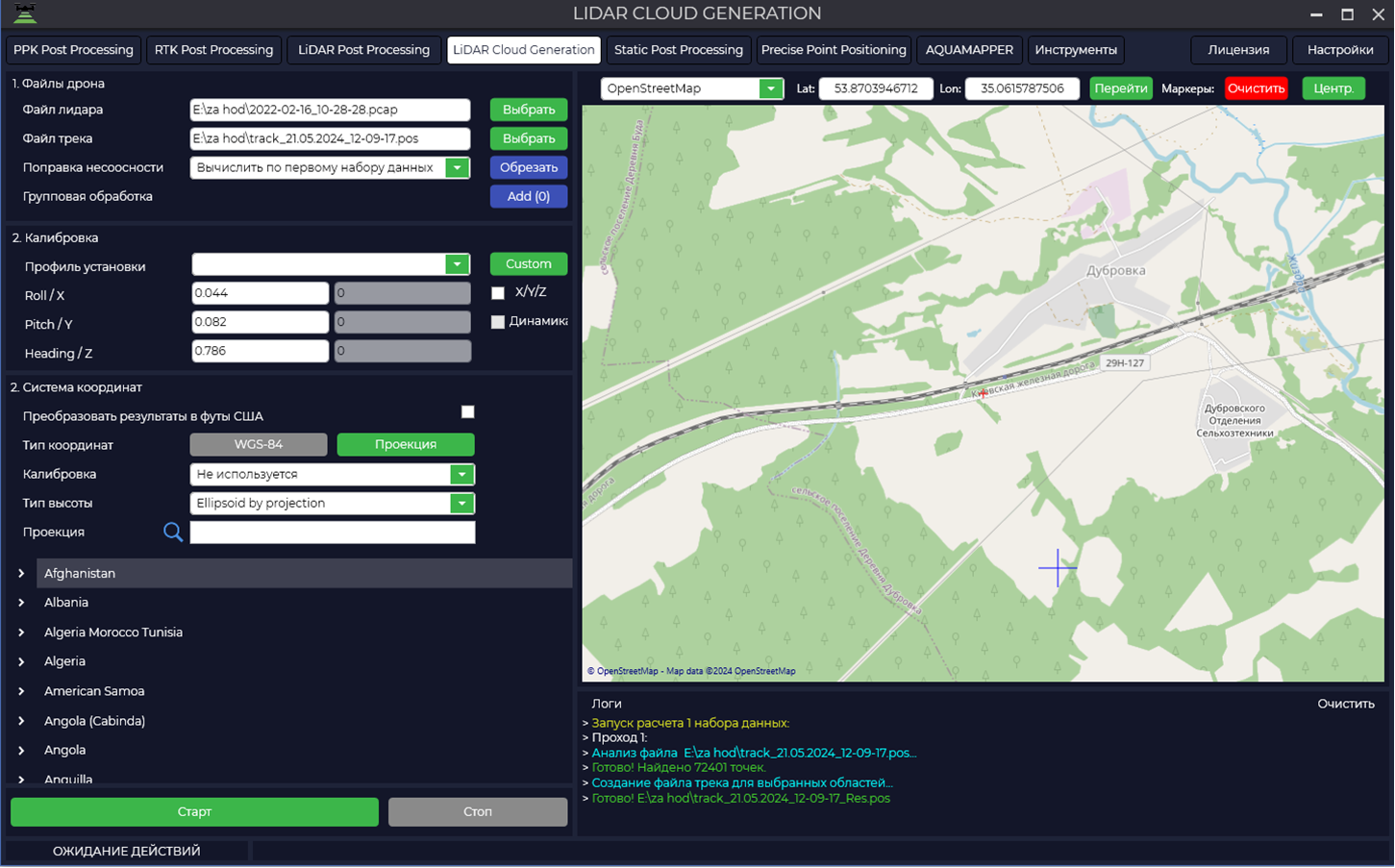
LiDAR Cloud Generation
- Разработан новый алгоритм расчета калибровочных углов с введением множителя, зависящего от скорости движения, что ускоряет время нахождения поправок.
AQUMAPPER
- Добавлена поддержка двухчастотного эхолота (200 кГц + 450 кГц). Низкочастотный сигнал (200 кГц) обеспечивает большую глубину проникновения, а высокочастотный (450 кГц) — более высокую четкость и детализацию дна. Совместное использование частот увеличивает как глубину съемки, так и возможность разделения слабых сигналов для получения детализированных данных.
- В окне «Plot» добавлено отображение траектории движения.
TPP v.1.4.5.0
12 ноября 2024 года.
PPK Post Processing
-
Реализована поддержка ГНСС-приемников компании UNICORE.
- Доработан алгоритм генерации файлов геопривязки, который использоваться для раскраски облака точек, полученного с лазерных сканеров TOPODRONE.
RTK Post Processing
-
Обеспечена корректная конвертация файлов из формата
.binв.obsи.nav.
TPP v.1.4.4.4
04 ноября 2024 года.
PPK Post Processing
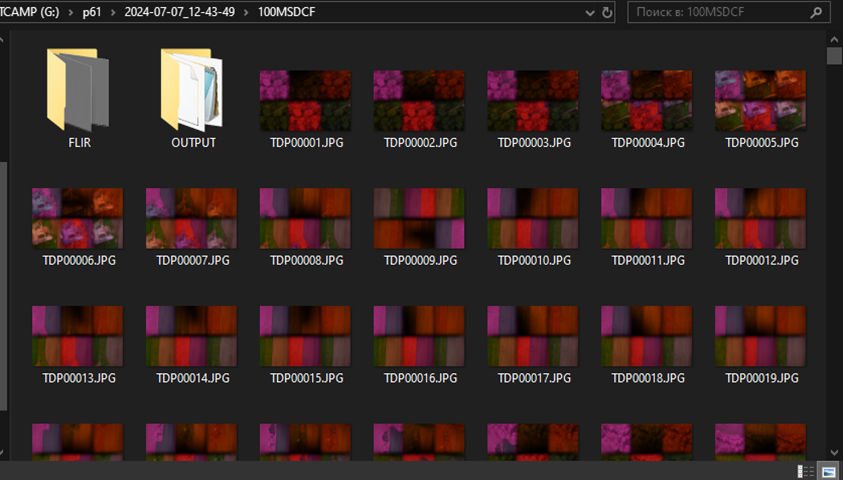
-
Добавлено автоматическое создание файла временных событий срабатывания затвора камеры для последующего использования в утилите раскраски облаков точек полученных лазерными сканерами TOPODRONE.
![]()
RTK Post Processing
-
Обеспечена корректная конвертация данных из собственного формата
.binв стандартный формат RINEX.
LiDAR Post Processing
-
Перед отправкой на обработку на сервер файл измерений с базовой станции в формате *.**O автоматически конвертируется в формат *obs для обеспечения совместимости.
Новые утилиты
-
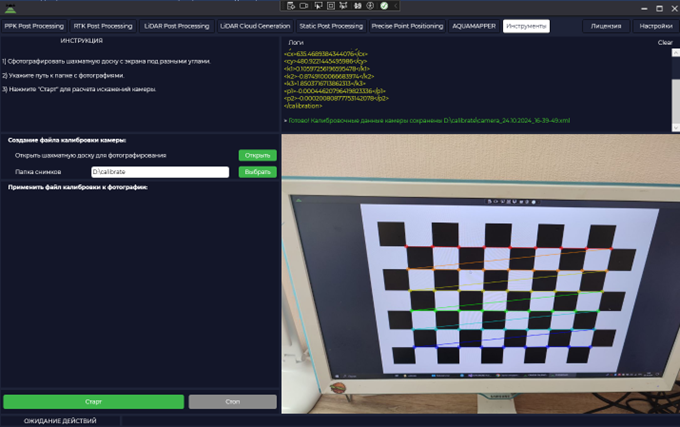
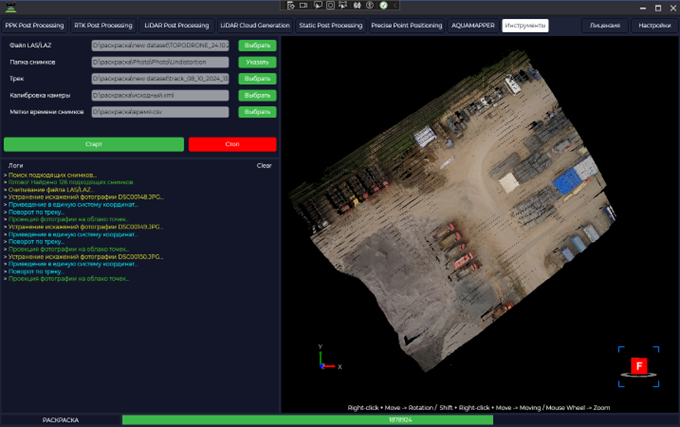
Коррекция дисторсии.
- Реализована новая утилита калибровки камеры, предназначенная для расчета параметров внутреннего ориентирования: координаты главной точки, фокусного расстояния, коэффициентов радиальной и тангенциальной дисторсии на фотографиях.

- Реализована новая утилита калибровки камеры, предназначенная для расчета параметров внутреннего ориентирования: координаты главной точки, фокусного расстояния, коэффициентов радиальной и тангенциальной дисторсии на фотографиях.
- Текстурирование облака точек.
- Добавлена утилита раскраски облаков точек по данным фотографий при совместном использовании фотограмметрической камеры и лазерного сканера TOPODRONE.
TPP v.1.4.4.2
02 октября 2024 года.
Общие улучшения
-
Во всех модулях добавлена кнопка "Очистить логи" для быстрой очистки окна журнала обработки.
-
Файлы систем координат(*.prj) теперь хранятся на сервере. Добавлена функция их загрузки через раздел "Общие настройки".

PPK Post Processing / RTK Post Processing
- Обновлены и исправлены конфигурационные файлы для модулей.
LiDAR Cloud Generation
-
Оптимизирован алгоритм расчета калибровочных углов. Количество итерационных проходов ограничено 10 для предотвращения избыточных вычислений.
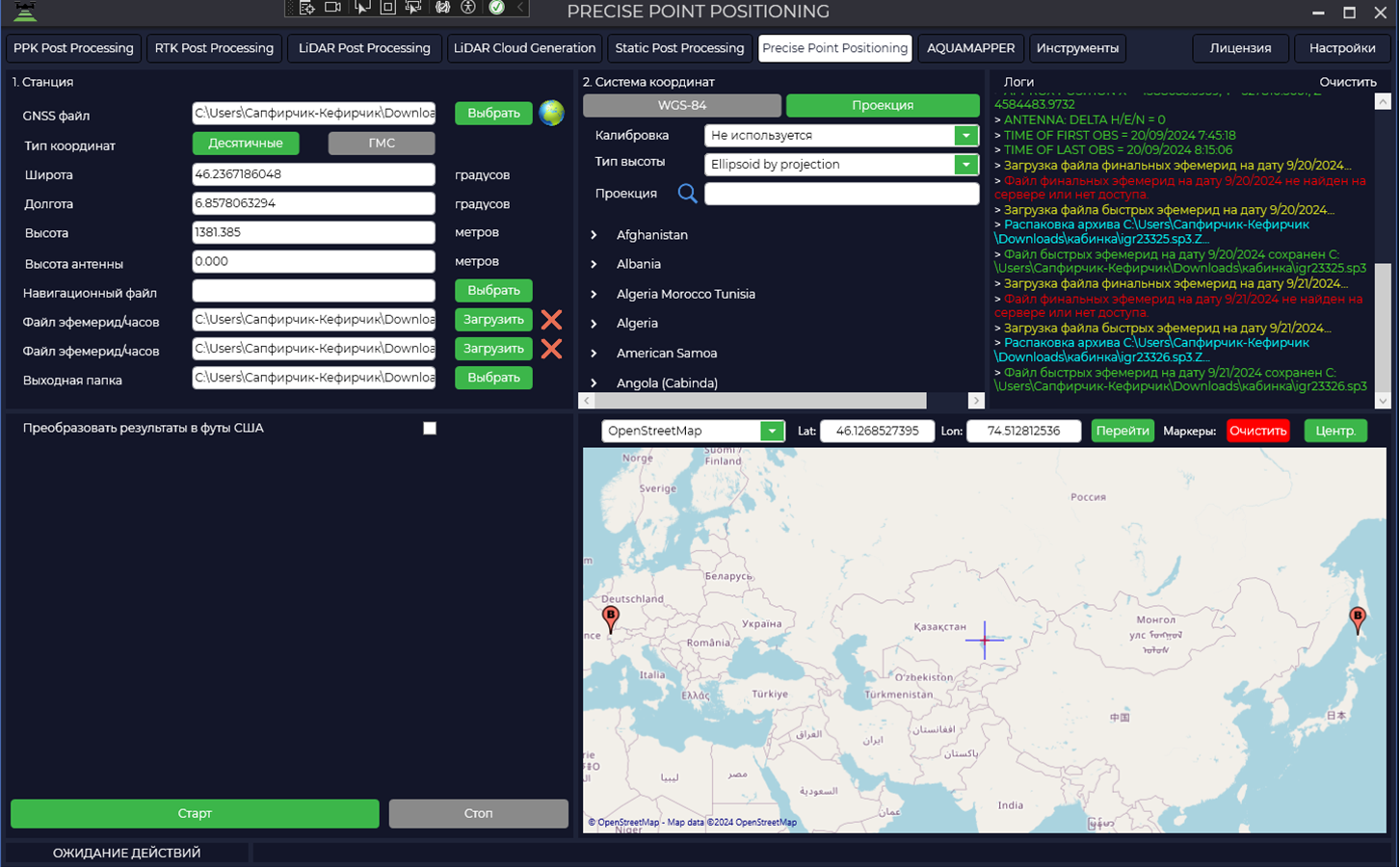
Static Post Processing / PPP
-
Обновлены источники для автоматической загрузки эфемерид. Теперь используются серверы University of California, San Diego (UCSD) вместо NASA для обеспечения доступности данных на каждый день.
AQUAMAPPER
-
Обеспечена корректная обработка данных при переходе времени ГНСС-оборудования через сутки и при групповом расчете наборов данных, снятых в течение нескольких недель.
TPP v.1.4.4.1
10 сентября 2024 года.
PPK Post Processing / RTK Post Processing
-
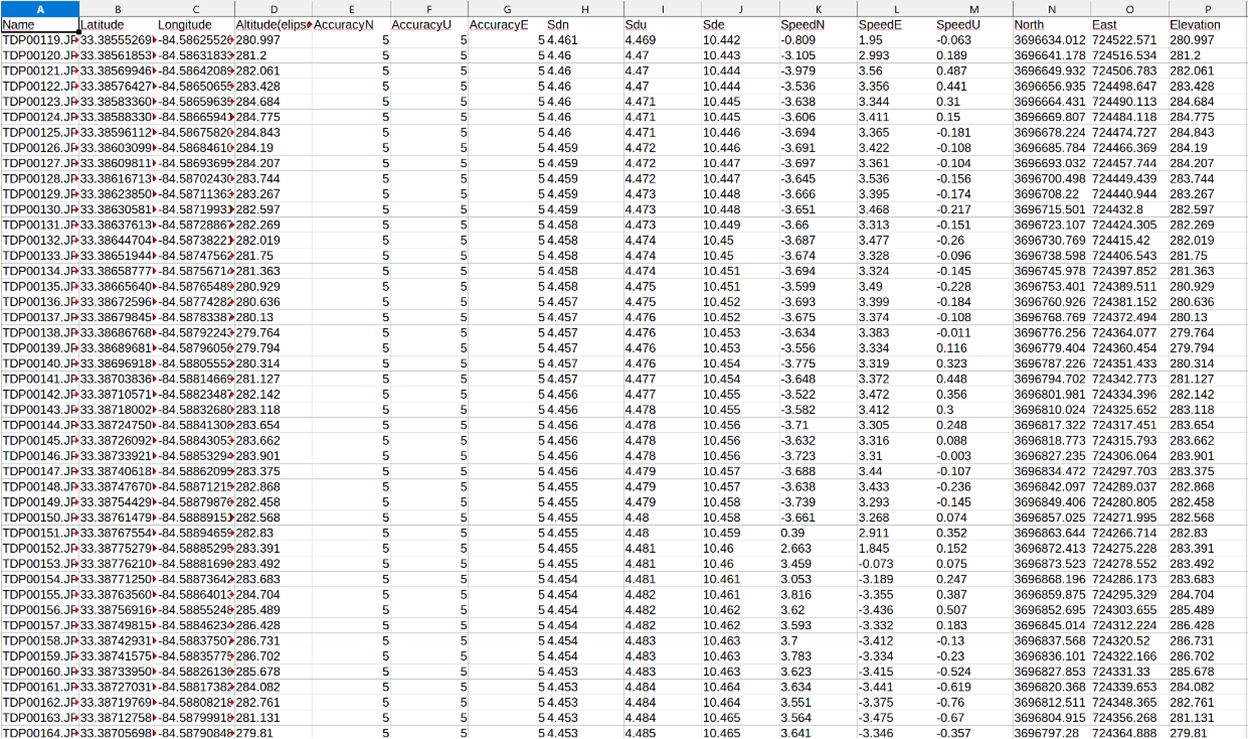
Данные о скоростях в выходных файлах теперь корректно считываются из
event.pos. Ранее ошибочно использовался файлpos.stat, который в некоторых сценариях содержал нулевые значения. -
Устранен нежелательный сброс картографического вида в координаты (0;0) после обработки траекторий для камер, не имеющих навигационных данных. Вид карты теперь сохраняется неизменным.
- Устранена ошибка, при которой после обработки данных с камеры TOPODRONE PT61 для других камер ошибочно формировались превью для несуществующего тепловизионного датчика.
LiDAR Post Processing
-
Реализована возможность ввода координат базовой станции непосредственно в местной системе координат с учетом модели геоида.
LiDAR Cloud Generation
-
При генерации нескольких облаков по одной траектории, каждая копия траектории в МСК получает уникальный префикс
_ЧЧММСС(часы-минуты-секунды генерации), что исключает их перезапись. -
Алгоритм поиска калибровочных углов дополнен автоматическим вычислением коэффициента масштабирования курса в зависимости от скорости движения, что значительно сокращает необходимое количество итерационных проходов.
AQUAMAPPER
-
При групповой обработке добавлена возможность одновременной загрузки и обработки данных в формате UBX.
Утилиты
-
В утилите "Просмотрщик IMR файлов" график вибрации теперь отображается с базовой линией, "посаженной на 0" для более наглядного анализа.
-
Проведена доработка алгоритма парсинга данных с сенсоров Livox MID-360, что обеспечило их полную и точную обработку.
TPP v.1.4.4.0
13 августа 2024 года.
PPK Post Processing
-
Исправлено некорректное формирование превью-изображений для тепловизора камеры TOODRONE PT61. Алгоритм теперь корректно обрабатывает сенсоры разных размеров (320 и 640 пикселей).
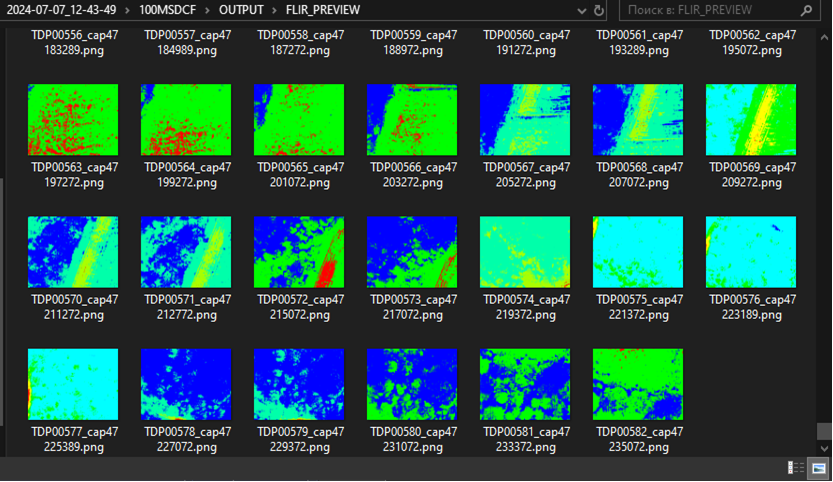
- Исправлена ошибка, при которой разное количество фотографий c камеры TOPODRONE PT61 и меток времени приводило к пропуску окна ручного сопоставления и, как следствие, отсутствию выходного каталога центров фотографий.
PPK Post Processing / RTK Post Processing
-
Обеспечено корректное формирование столбцов и структуры файла при экспорте каталога центров фотографий для программ Agisoft Metashape и 3DSurvey.
- В настройка возвращено поле "Коррекция времени метки" в параметрах фотограмметрии.
Инструменты
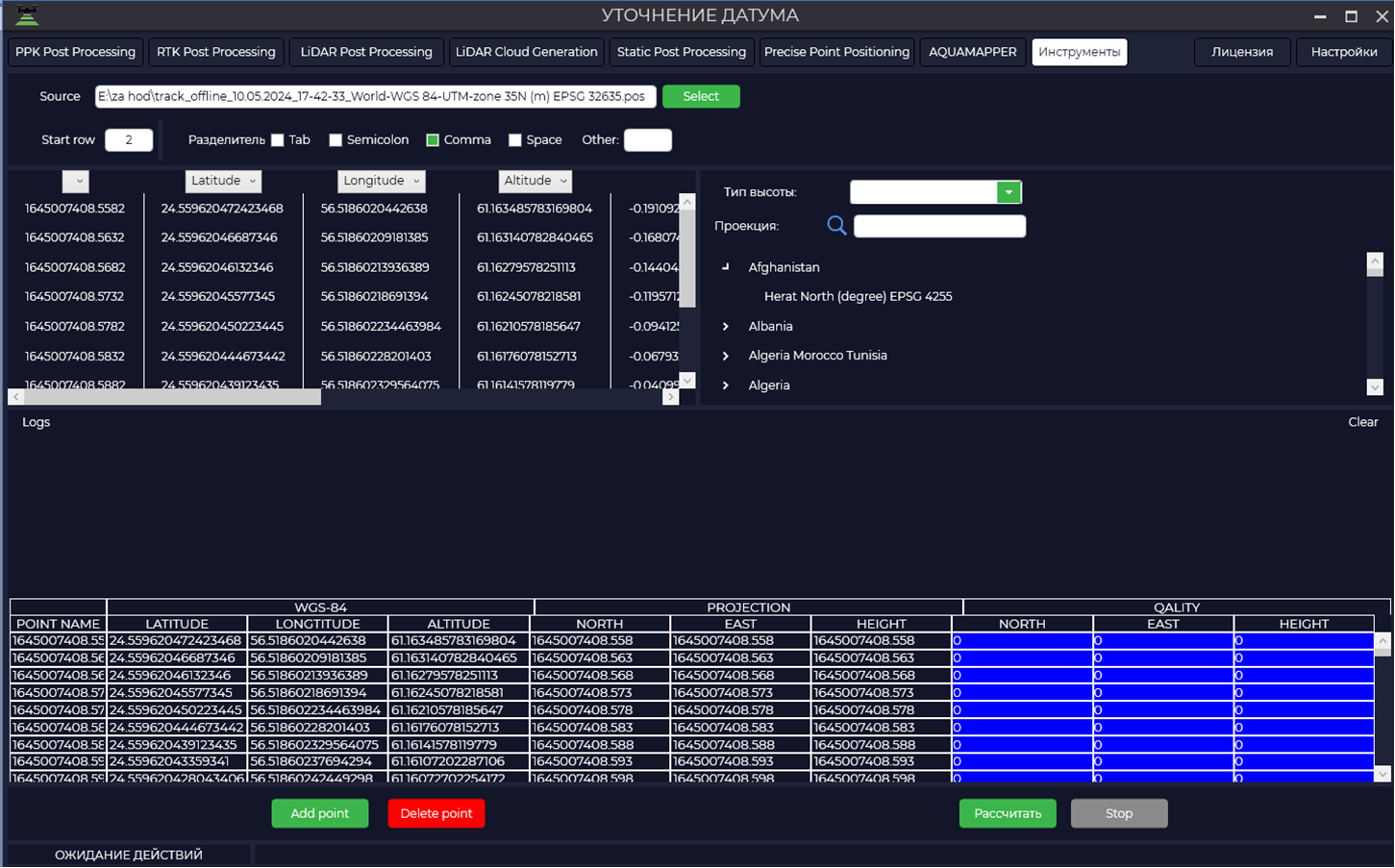
- Расчет параметров датума.
- Реализован собственный алгоритм расчета параметров датума для систем координат. Ранее использовалась сторонняя библиотека, теперь применено собственное решение для повышения точности и контроля преобразований.
- Сшивка файлов трека.
- Исправлено некорректное формирование заголовка (шапки) файла при выполнении операции сшивки треков.
- Исправлено некорректное формирование заголовка (шапки) файла при выполнении операции сшивки треков.
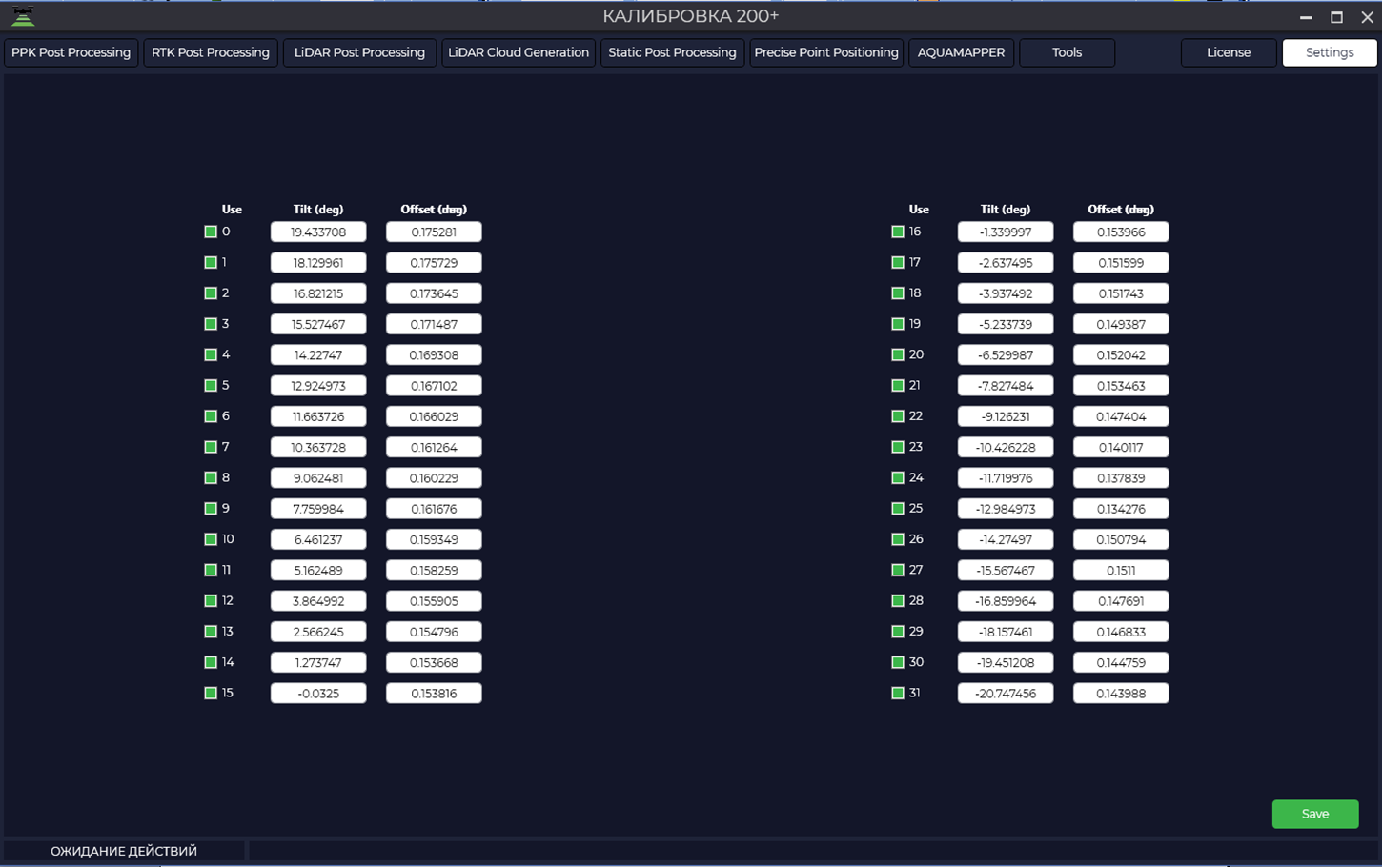
- Калибровка.
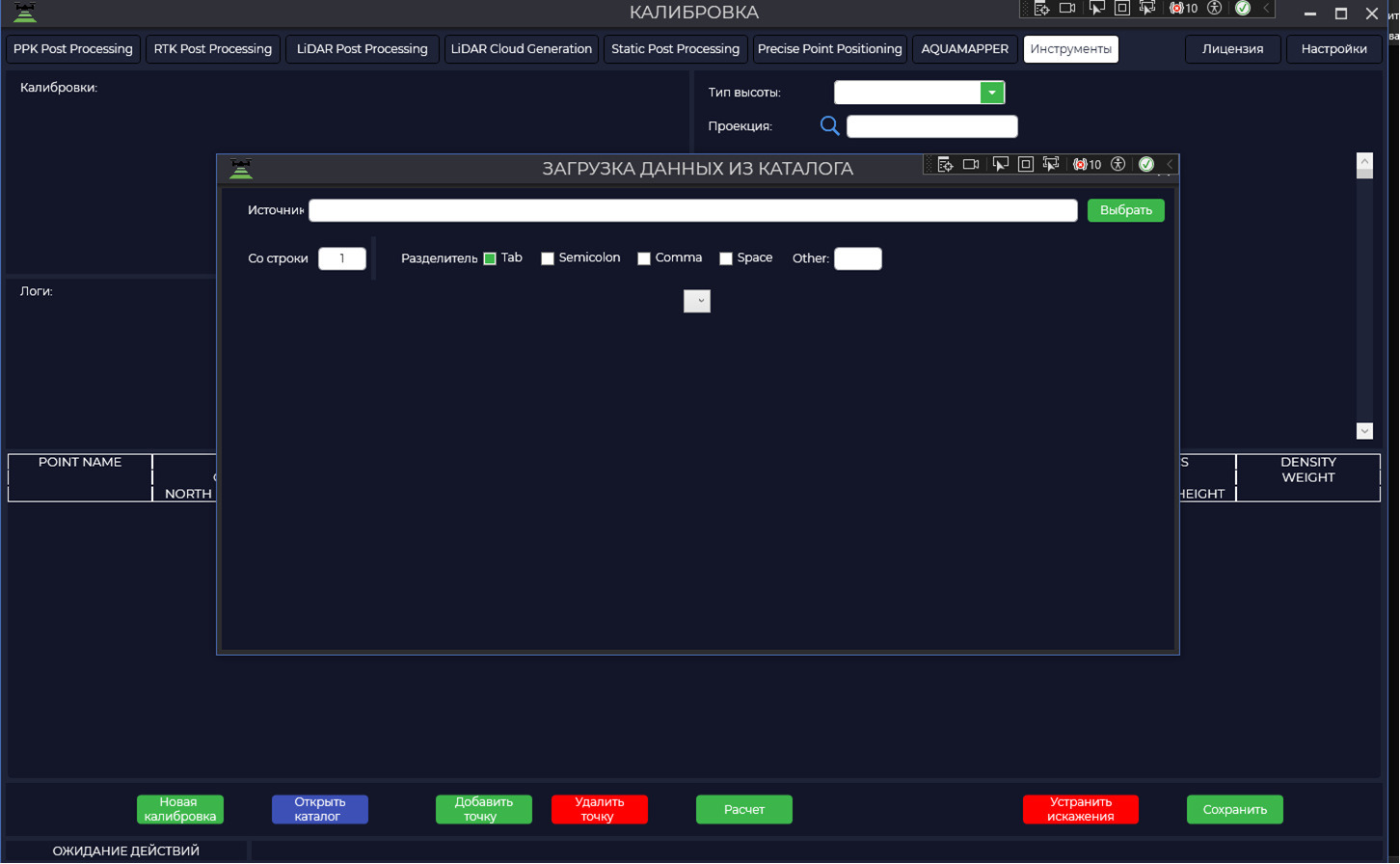
- В интерфейс калибровки добавлена кнопка "Открыть каталог" для загрузки каталогов точек.
- В интерфейс калибровки добавлена кнопка "Открыть каталог" для загрузки каталогов точек.
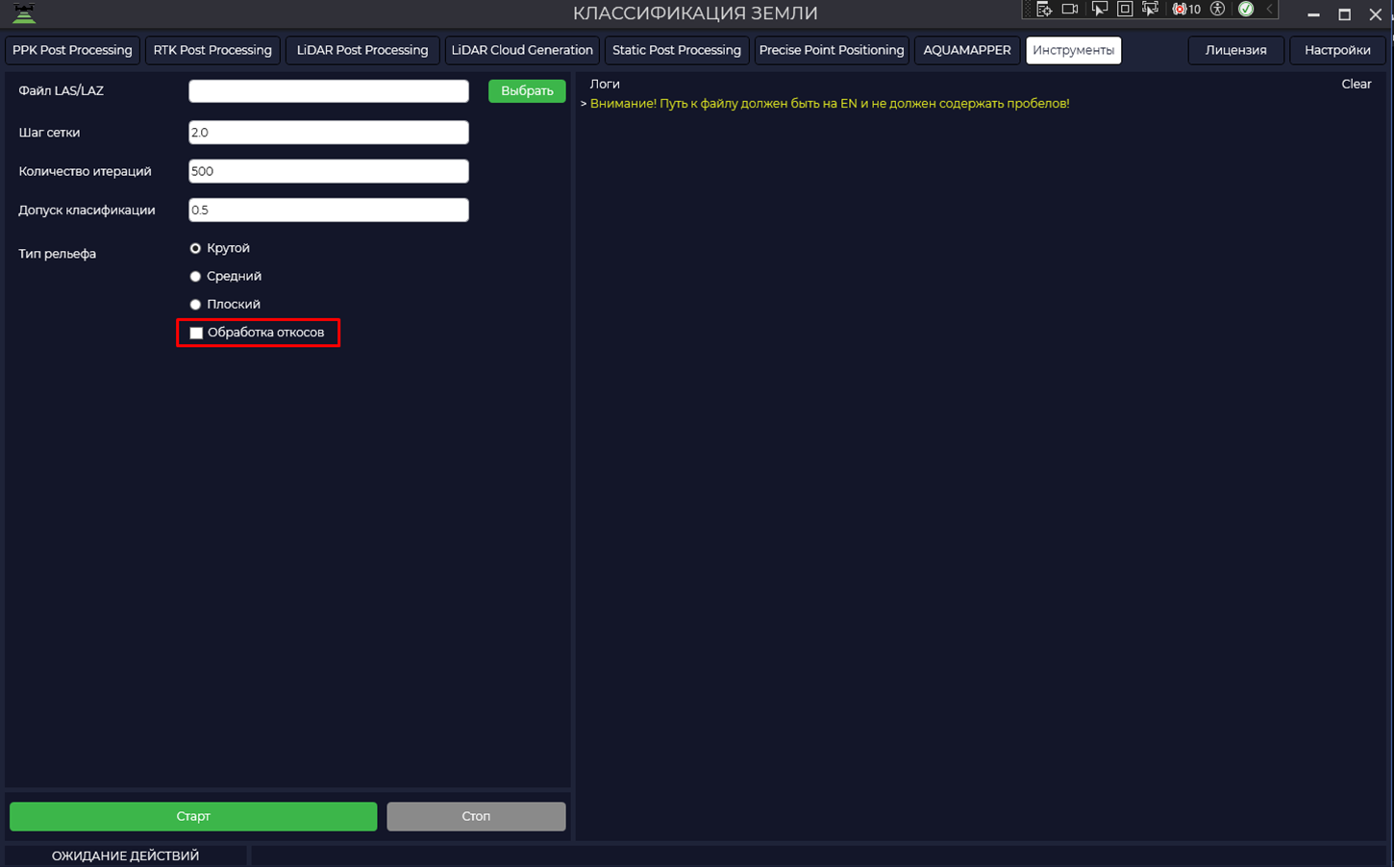
- Классификация земли
- В модуль классификации земли добавлена опция — "Обработка откосов" для улучшения анализа рельефа.
- Просмотрщик IMR
- В утилиту добавлено отображение графиков вибрации по осям для детального анализа качества данных инерциальной системы.

TPP v.1.4.3.0
30 июля 2024 года.
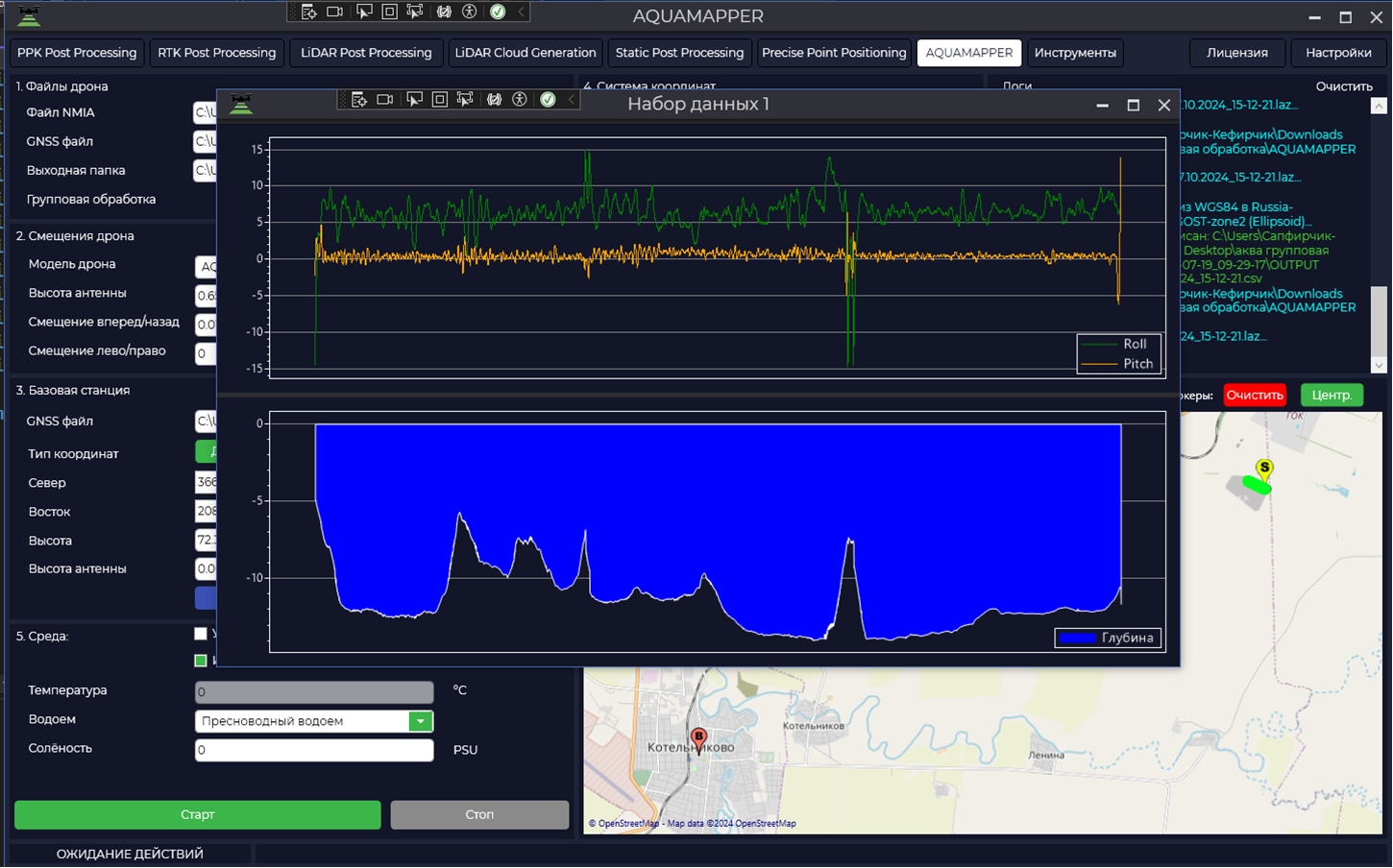
AQUAMAPPER
-
Настройки обработки данных выведены в пользовательский интерфейс (UI) для более удобного и гибкого управления параметрами.
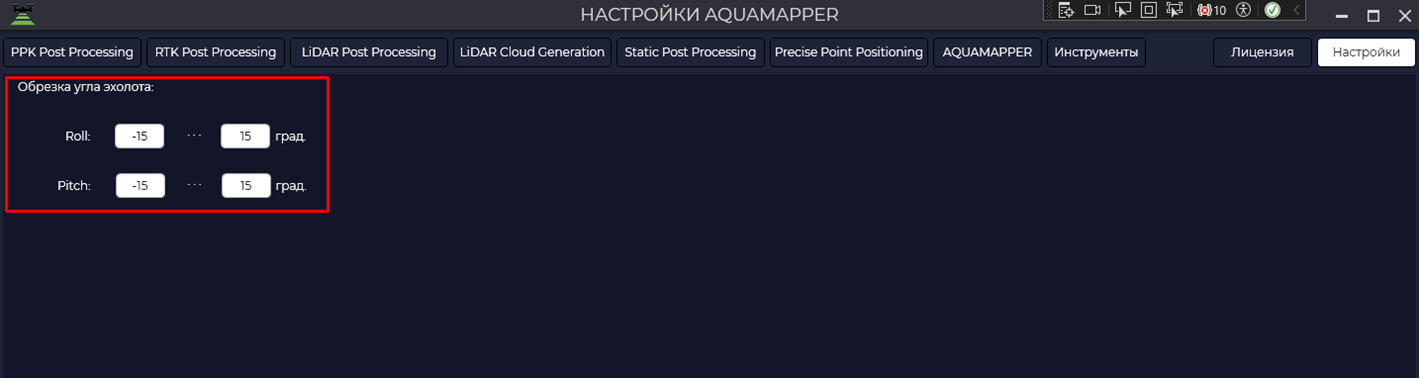
- Добавлена инфографика, отображающая ключевые параметры: крен (ролл), дифферент (питч) оборудования и рельеф дна водоема для контроля качества данных съемки.
Инструменты
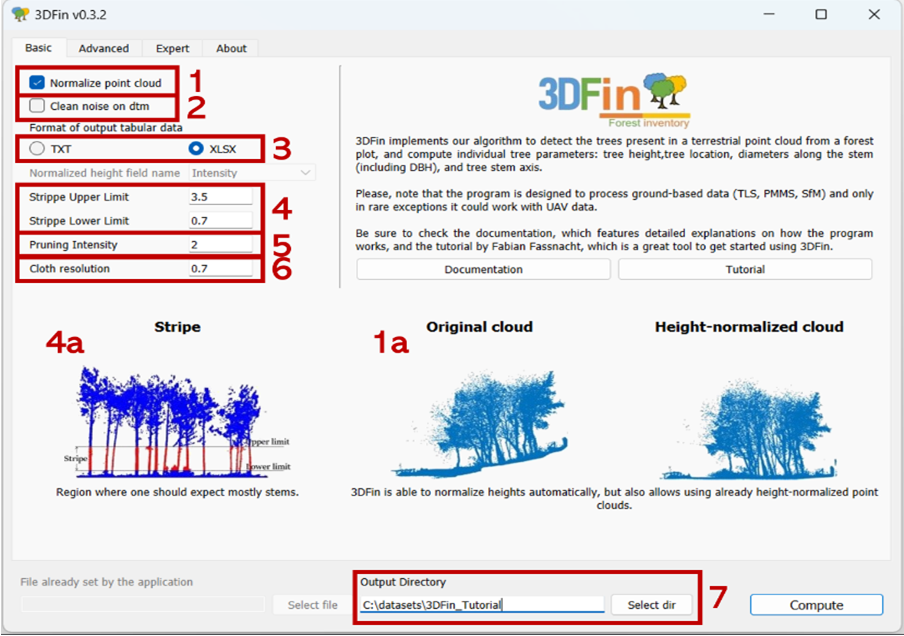
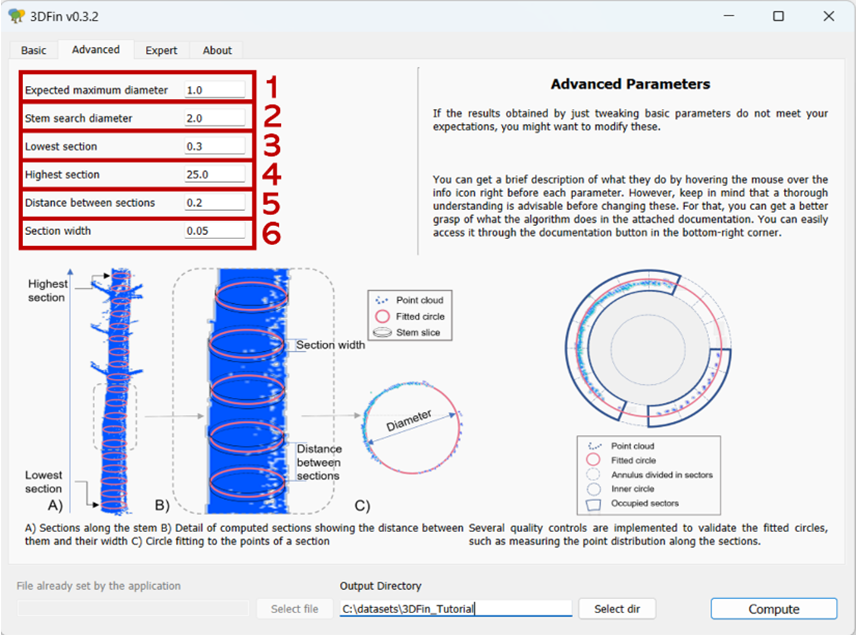
- Добавлена новая утилита «3DFine: Инвентаризация леса»
- Утилита предназначена для автоматизированного анализа данных лазерного сканирования с целью таксации лесных массивов. Алгоритмы утилиты автоматически детектируют деревья, вычисляют такие таксационные показатели, как высота, диаметр ствола на высоте груди (DBH) и площадь сечения, и формируют стандартные отчеты для лесного хозяйства.
TPP v.1.4.2.0
20 июня 2024 года.
PPK Post Processing
- Добавленна поддержка камеры TOPODRONE PT61, в том числе и с мультиспектральными объективами AGROWING.
Инструменты
- Просмотрщик облака точек. Обновили версию PotreeConverter с 1.7 до 2.1.
TPP v.1.3.3.4
23 апреля 2024 года.
Инструменты.
- Обрезка IMR. Добавлена возможность выполнять обрезку файла, полученного с инерциального датчика без загрузки данных с геодезического приемника.

TPP v.1.3.3.0
05 апреля 2024 года.
LiDAR Post Processing
- При групповом расчете высокоточных треков для оптимизации производительности на карту выводится в 10 раз меньше точек для визуализации. Это решает проблему "замораживания" интерфейса программы при отрисовке треков, содержащих большое количество точек.
LiDAR Cloud Generation
-
Реализован новый, усовершенствованный алгоритм расчета калибровочных углов установки сканеров, обеспечивающий повышенную точность и стабильность результатов.
-
Исправлено: Корректно работает функция обрезки длины луча для данных с лазерных сканеров с сенсорами от производителя Hesai.
- SLAM обработка. Для повышения точности привязки, возвращение облака точек на трек выполняется с использованием параметров калибровки.
TPP v.1.3.2.2
17 марта 2024 года.
Общие улучшения
- Автоматическая установка зависимостей.
- Ключевые зависимости (WinPcap и .NET Core 3.1 Desktop Runtime) теперь устанавливаются автоматически в процессе инсталляции дистрибутива, избавляя пользователя от необходимости ручной настройки окружения.
LiDAR Cloud Generation
- Реализован новый итеративный алгоритм расчета калибровочных углов. Углы рассчитываются и применяются пошагово (погалсно) для постепенного уточнения и корректировки наклона трека, что значительно повышает точность финального облака точек.
AQUAMAPPER
- В состав дистрибутива полностью интегрирован модуль AQUAMAPPER для комплексной обработки данных гидрографических съемок.
TPP v.1.2.0.1
23 ноября 2023 года.
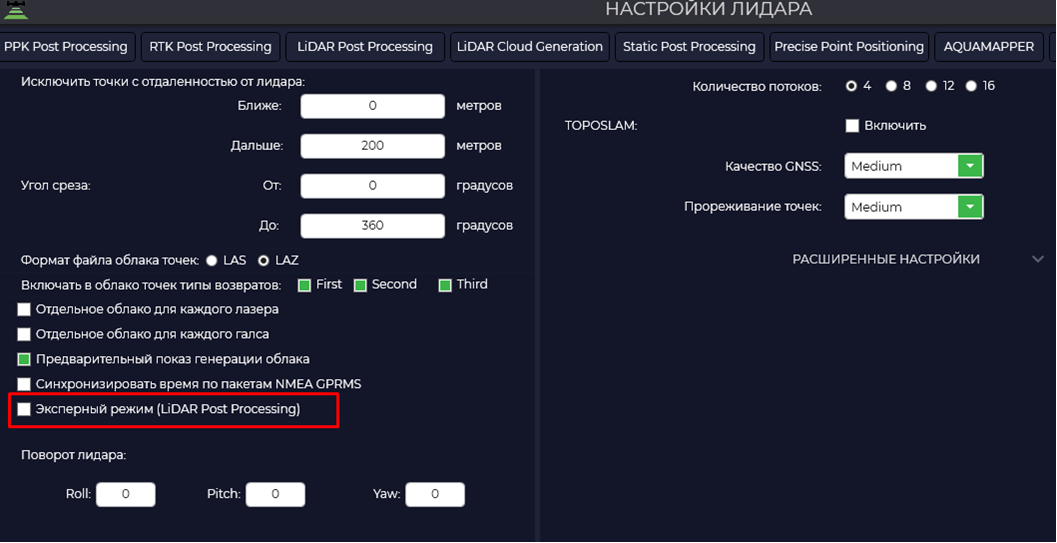
LiDAR Post Processing
-
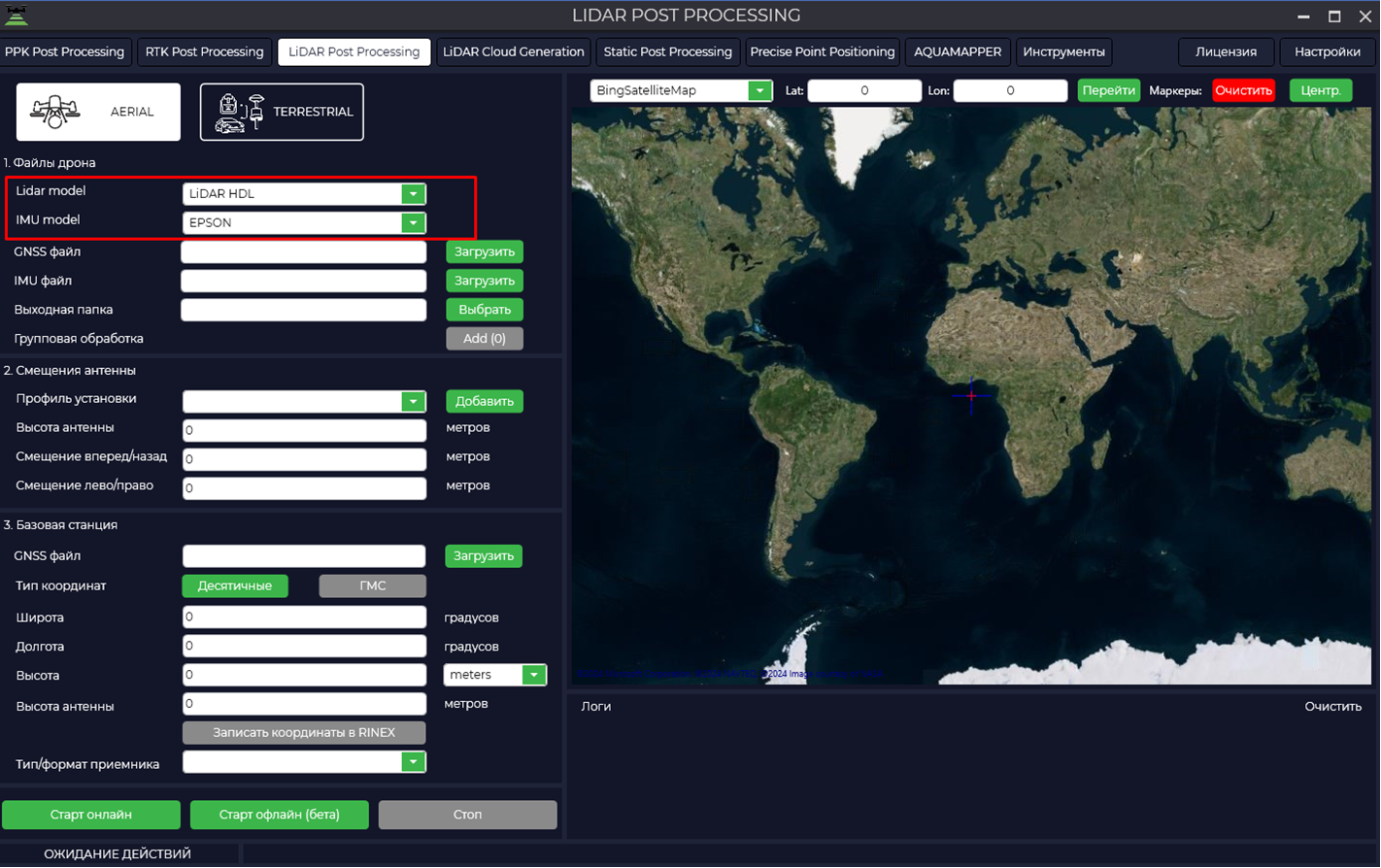
В настройках реализовано переключение между Стандартным и Экспертным режимами работы в настройках программы.
-
Стандартный режим: Выполняет автоматическое определение модели IMU и лидара, упрощая настройку для пользователя.
-
Экспертный режим: Предоставляет возможность ручного выбора конкретной модели IMU и лидара из списка для полного контроля над параметрами обработки.
-
TPP v.1.2.0.0
20 ноября 2023 года.
LiDAR Post Processing
- Реализован альтернативный алгоритм расчета координат трека на основе комплексной обработки информации угломерной навигационно-аппаратурной платформы и ГНСС.
LiDAR Cloud Generation
- Тип съемки (Воздушная / Наземная) определяется автоматически на основе обработанной траектории.
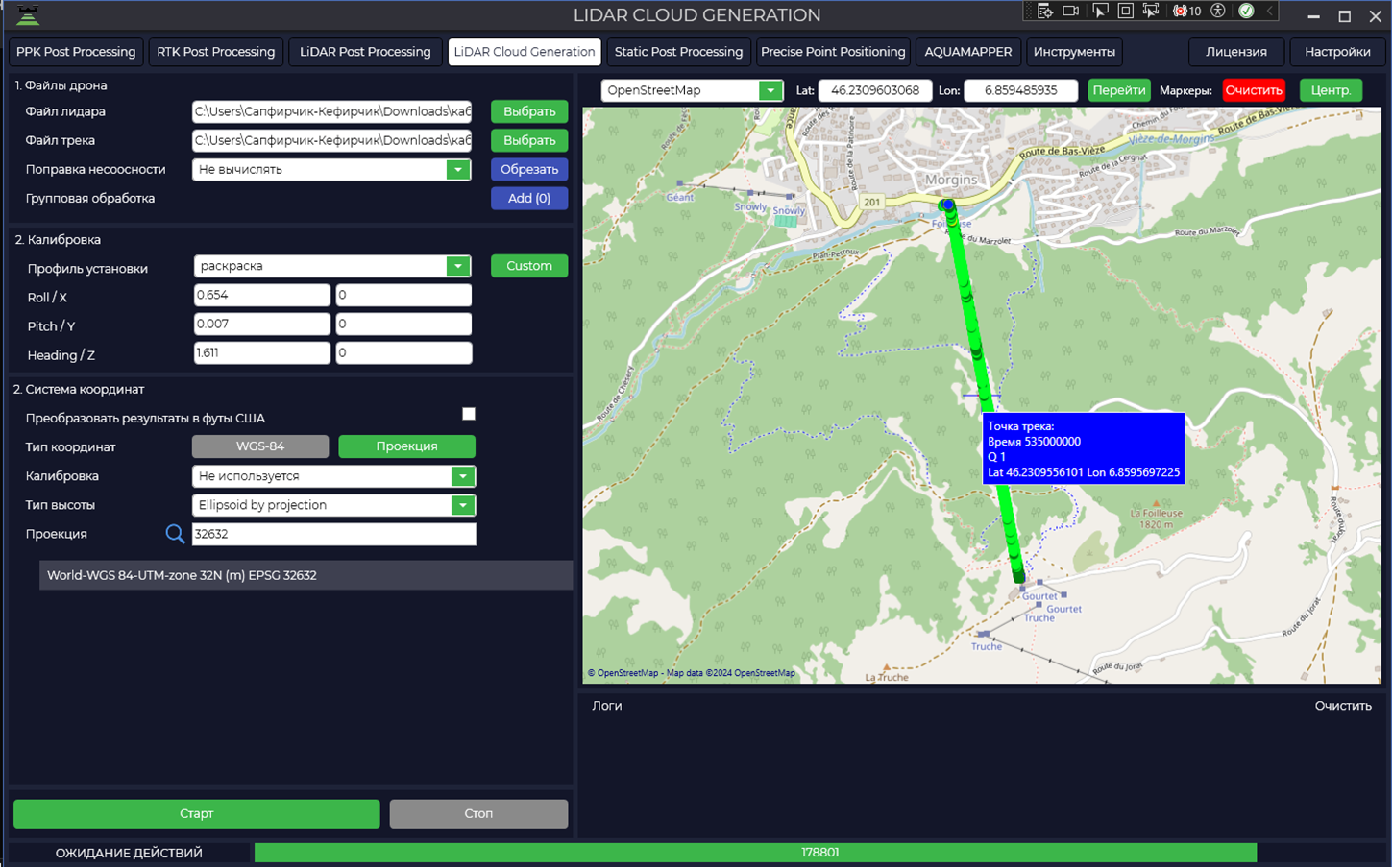
- Положение сенсора лазерного сканера (Вперед / Назад) определяется автоматически, на основе обработанной траектории что исключает ошибки ручного задания.
TPP v.1.1.17.0
13 ноября 2023 года.
LiDAR Cloud Generation
-
Реализован алгоритм автоматического определения и применения проекции UTM (Universal Transverse Mercator) на основе координат центра облака точек, если пользователь явно не указал систему координат в настройках.
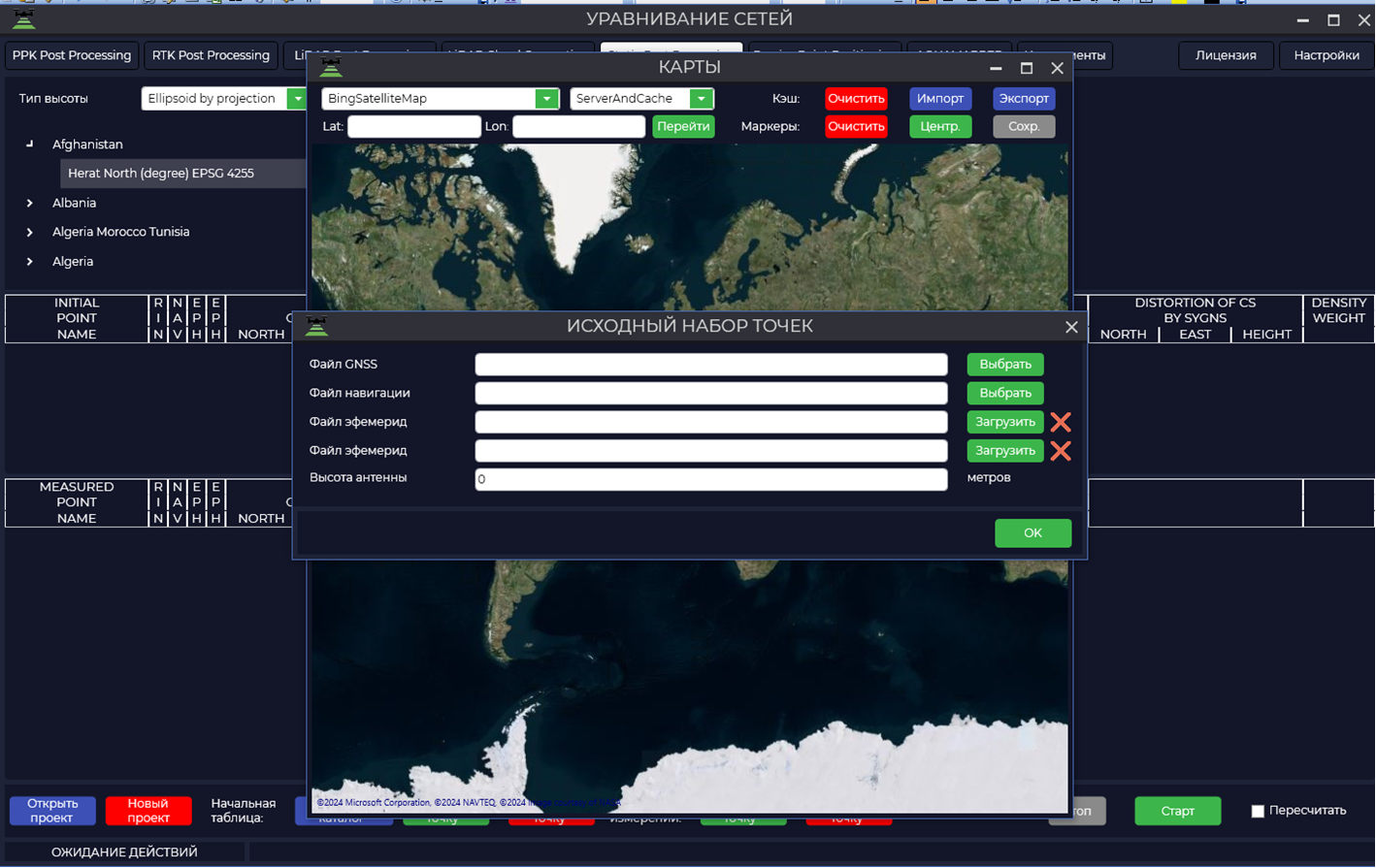
Static Post Processing
-
Реализована функция автоматического считывания и добавления навигационных координат из заголовков ГНСС-файлов базовой станции. Это упрощает начальную настройку обработки, особенно при работе с большим количеством сессий.
TPP v.1.1.16.1
01 ноября 2023 года.
PPK Post Post Processing / RTK Post Processing / Static Post Processing / Precise Point Positioning
- Комбинированный фильтр Калмана теперь активирован по умолчанию. Использование данного фильтра позволяет существенно повысить точность и сглаженность расчетных траекторий.
TPP v.1.1.16.0
30 октября 2023 года.
LiDAR Cloud Generation
-
Реализован новый алгоритм поиска калибровочных углов на основе ICP (Iterative Closest Point). Данный метод использует итеративное сопоставление облаков точек для точного вычисления углов установки лидара, что значительно повышает точность калибровки.
-
Добавлена поддержка лидара Livox MID-360, включая автоматическое распознавание, парсинг данных и расчет калибровочных параметров.
TPP v.1.1.15.0
04 октября 2023 года.
PPK Post Processing / RTK Post Processing
-
Полностью обновлен встроенный справочник моделей ГНСС-антенн. Актуализированные параметры антенн повышают точность поправок на фазовый центр и, как следствие, общую точность ГНСС-обработки.
Инструменты
- Добавлена новая утилита «Уточнение датума». Инструмент позволяет выполнять высокоточное преобразование и расчет параметров перехода между системами координат на основе каталогов точек.
TPP v.1.1.15.0
20 сентября 2023 года.
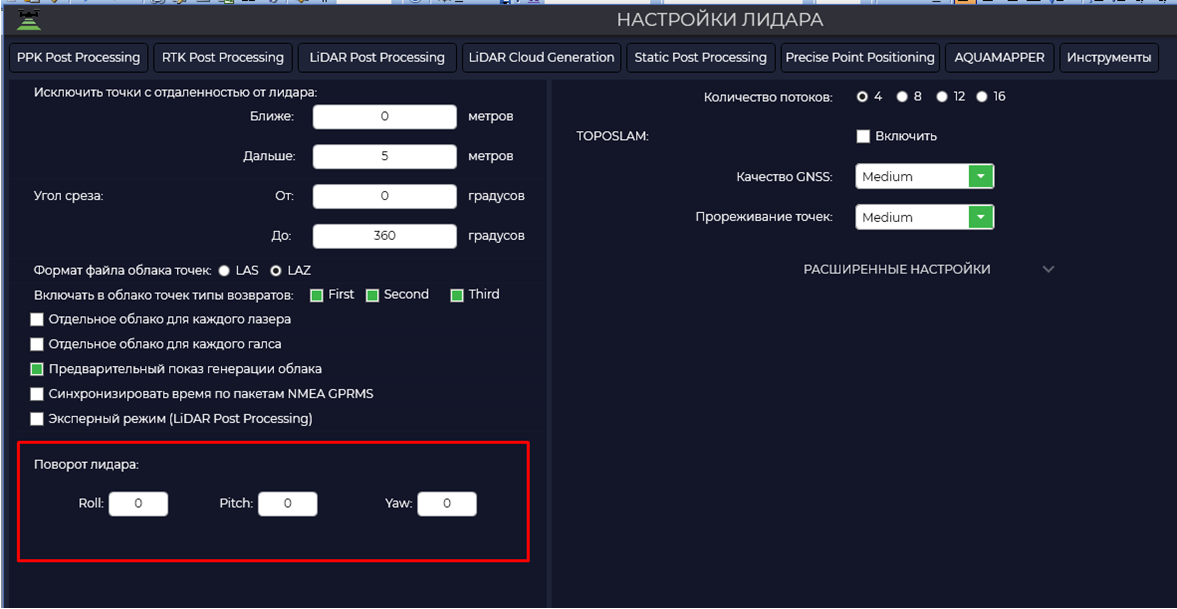
Настройки LiDAR Post Processing
-
Добавлена возможность указания вращения лидара относительно IMU (roll/pitch/heading).
Новые утилиты
-
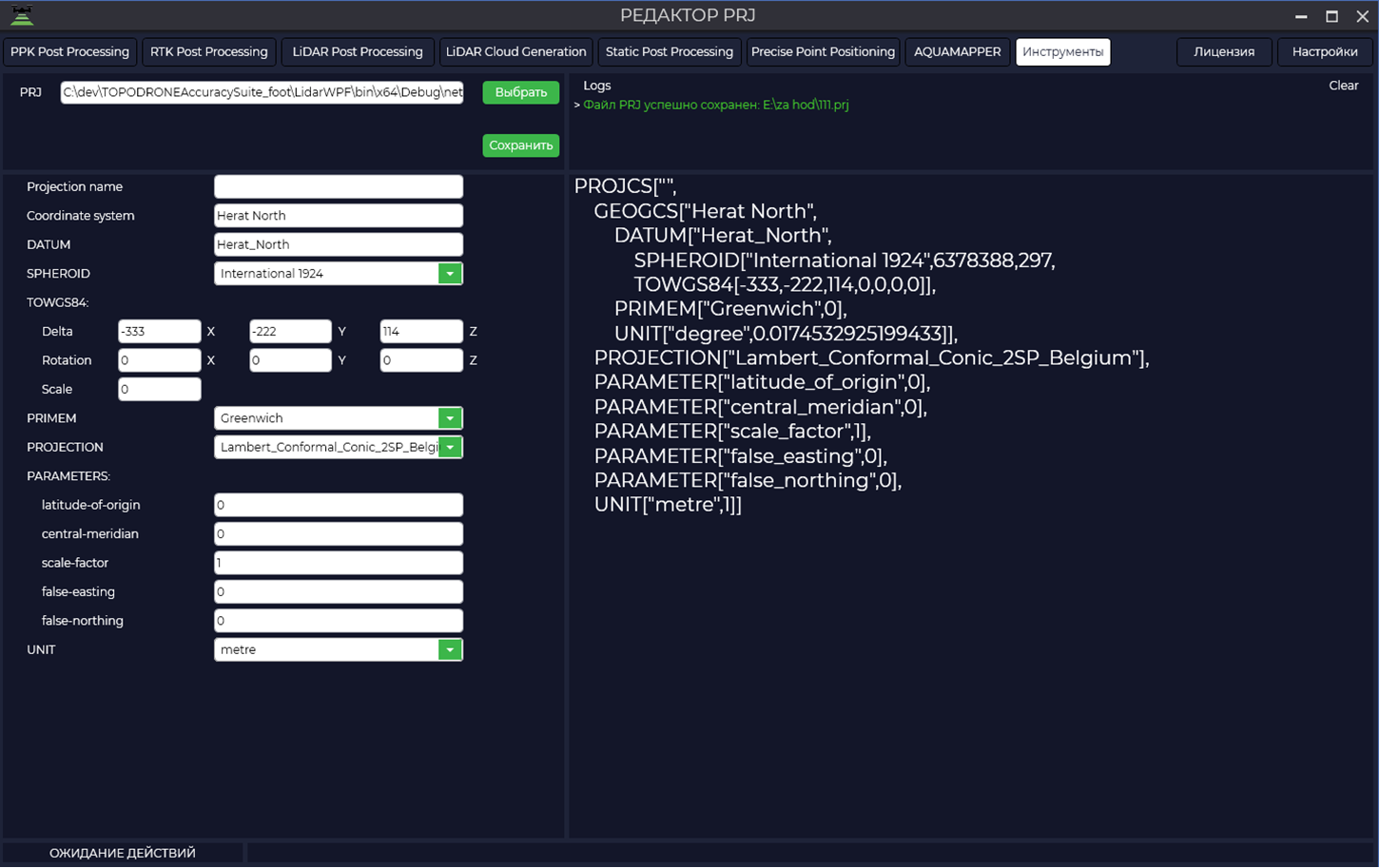
Редактор PRJ
-
Утилита позволяет корректировать параметры PRJ.
-
TPP v.1.1.13.0
29 августа 2023 года.
Общие улучшения
-
Добавлена автоматизированная загрузка геоидов с сервера TOPODRONE (199 геоидов). Теперь геоиды не идут в дистрибутиве (уменьшение размера дистрибутива), а скачиваются пользователями по мере необходимости.
Новые модули
-
Фотограмметрия
-
Добавлен модуль для фотограмметрической обработки, который основан на OpenDroneMap.
-

TPP v.1.1.12.0
22 августа 2023 года.
Общие улучшения
-
Встроена новая версия алгоритма расчета высокоточной траектории с поддержкой актуального оборудования TOPODRONE.
-
Обновлена библиотека работы с LAS/LAZ (поддержка форматов 1.3/1.4).
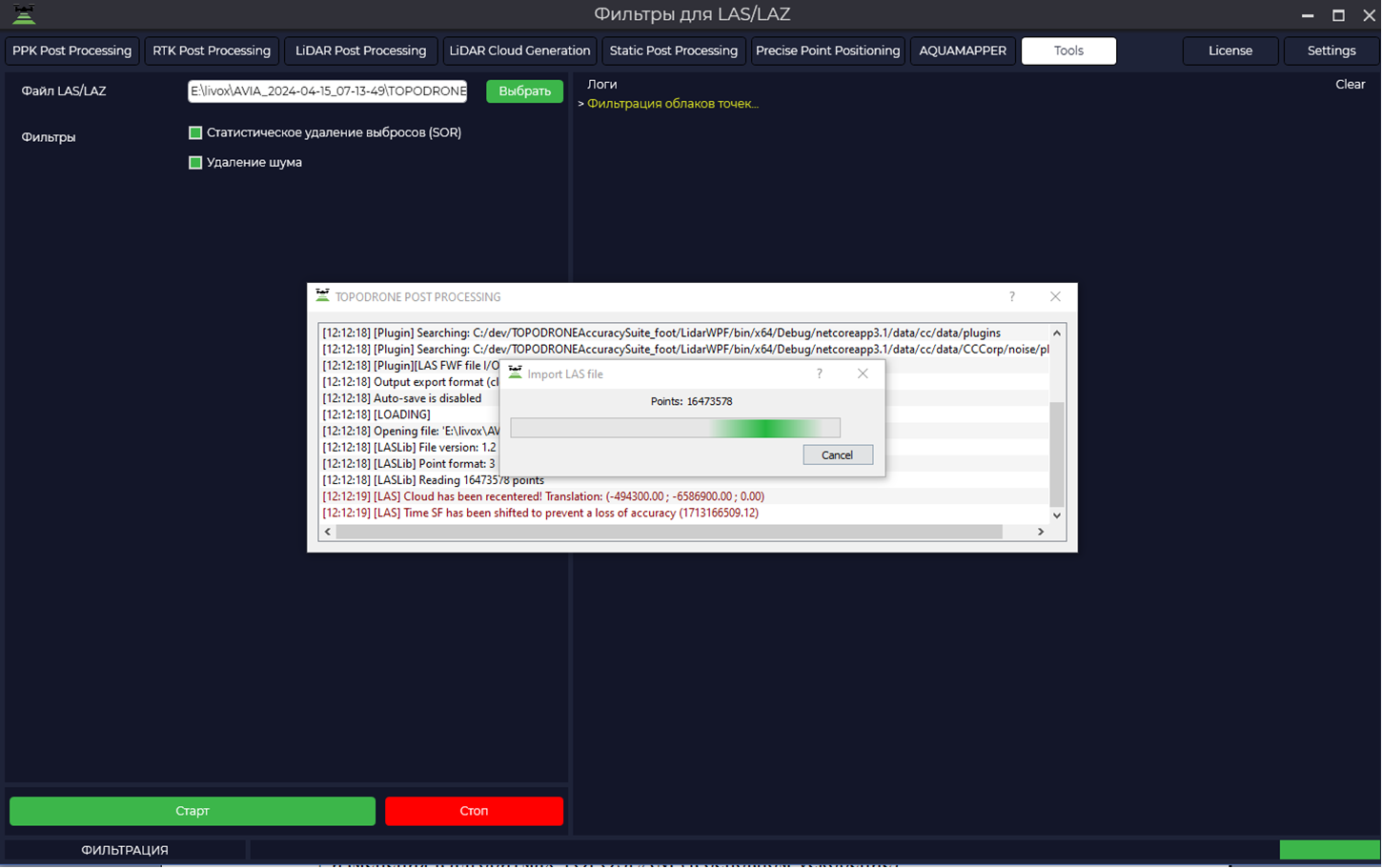
Обработка данных лазерного сканирования
-
Добавлены фильтры для улучшения качества облака точек лазерного сканирования: SOR и NOISE.
Новые утилиты
-
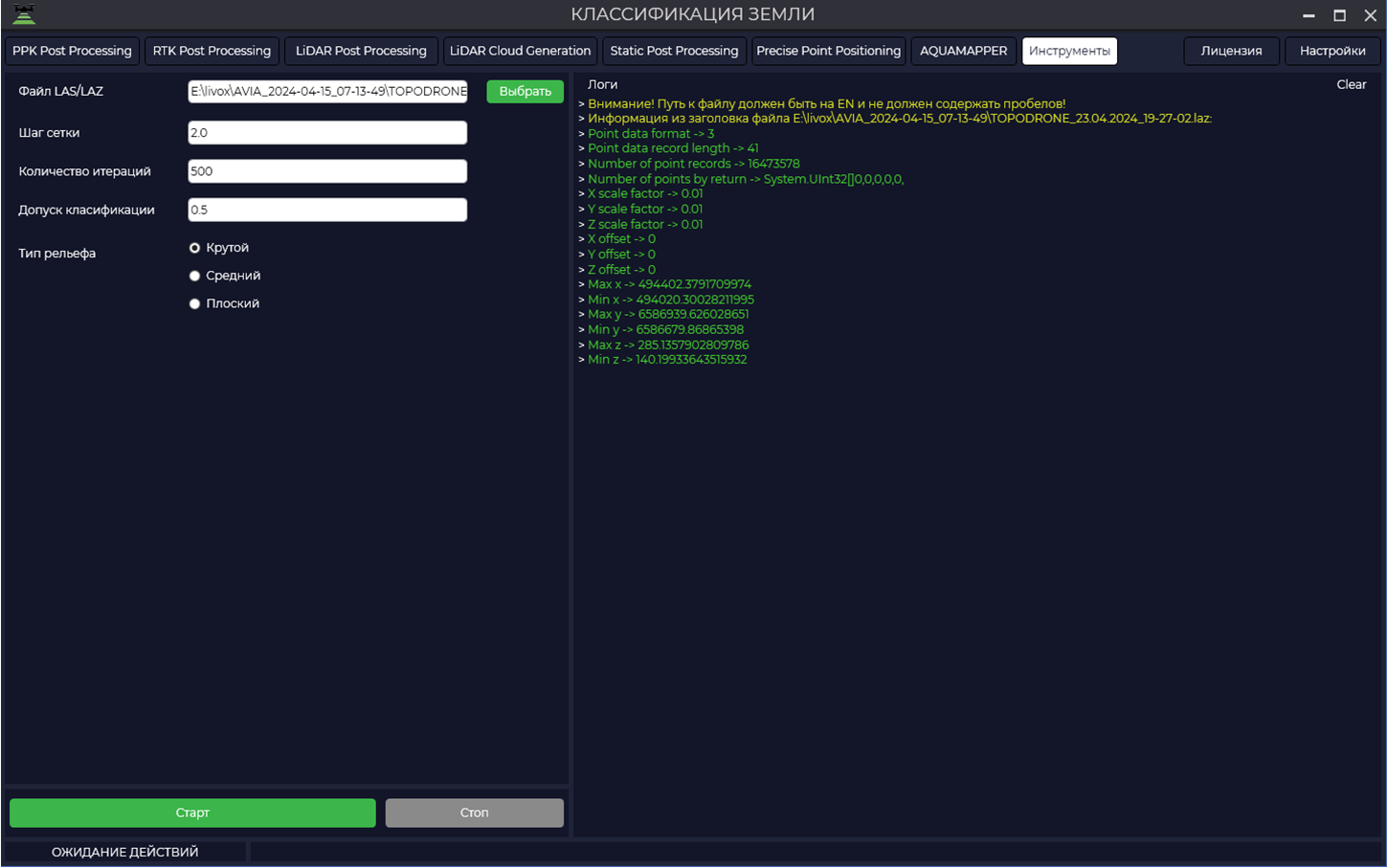
Классификация земли
-
Добавлена утилита позволяющая выполнить автоматическую классификацию рельефа.
-
TPP v.1.1.11.1
08 августа 2023 года.
Настройки LiDAR Cloud Generation
- Для сенсоров Hesai реализовано смещение оптической оси излучателя относительно геометрического центра чувствительной площадки сенсора.
TPP v.1.1.9.1
24 июня 2023 года.
PPK Post Processing / RTK Post Processing / LiDAR Cloud Generation
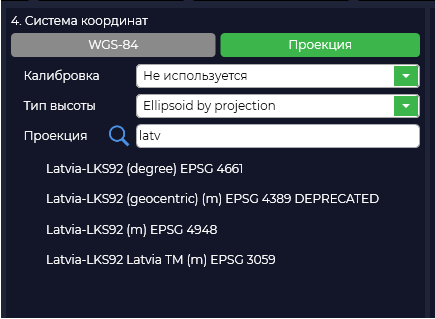
- Реализована новая система фильтрации систем координат, использующая прогрессивный полнотекстовый поиск. Результаты отображаются в виде списка, где каждый элемент представляет собой полное название проекции.
TPP v.1.1.9.0
04 июня 2023 года.
Общие улучшения
-
Утилита фильтрации спутников ускорена в 50 раз.
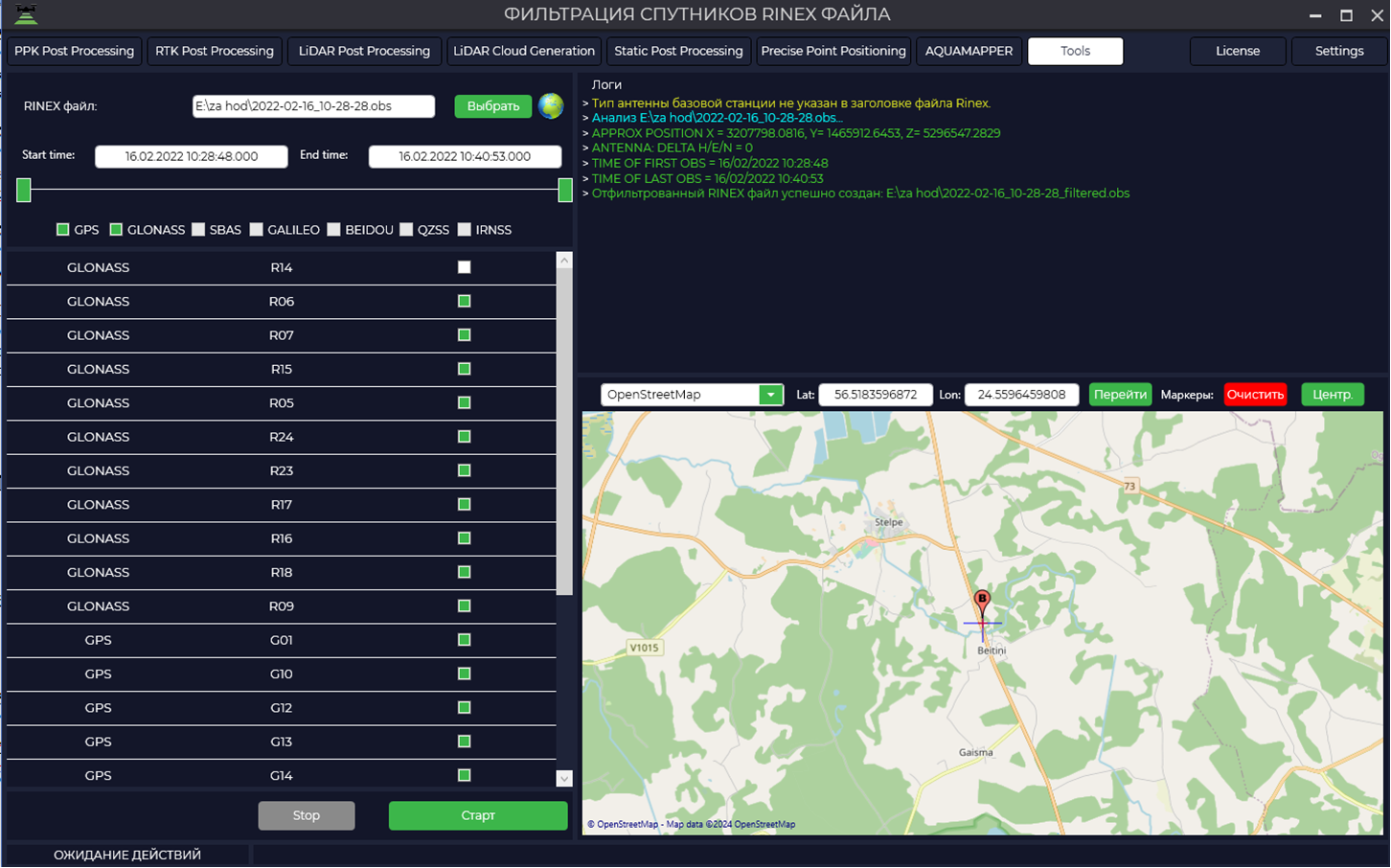
-
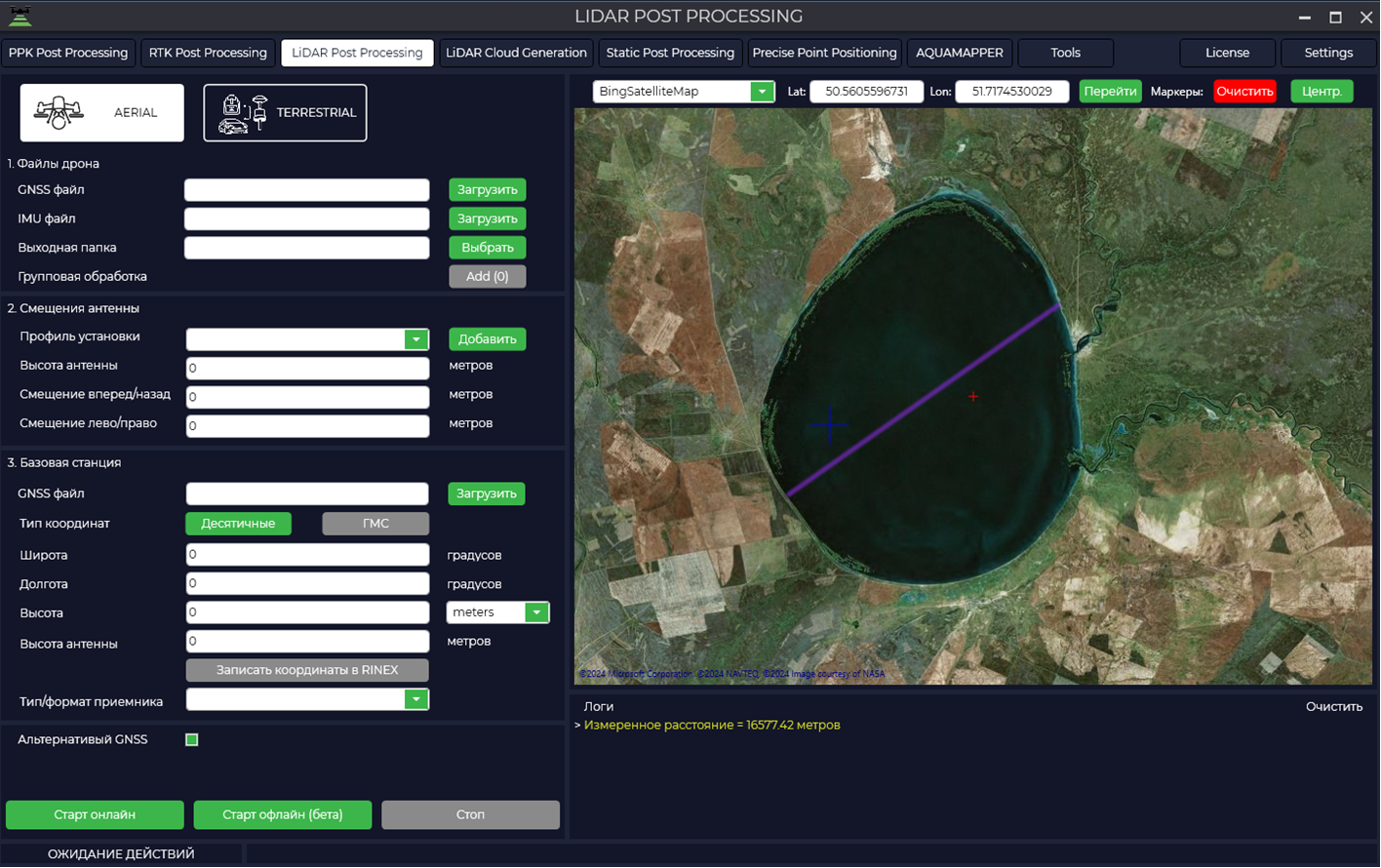
На все карты добавлена "линейка" для замеров расстояний. Нужно кликнуть два раза по карте и в логах напишется расстояние между этими точками (в футах или метрах в зависимости от состояния галочки "Футы").
Новые алгоритмы
-
TOPOSLAM
-
Добавлен новый алгоритм, состоящий из трех этапов. На первом этапе выполняется последовательное совмещение облаков по времени генерации. На втором – взаимное совмещение ближайших по расстояниям облаков. Третий этап, используя калибровку, возвращает положение совмещенных облаков на трек.
-