Лидарное сканирование
В данном разделе программы можно настроить параметры для высокоточной обработки траектории, генерации облака точек в том числе по технологию TOPOSLAM.
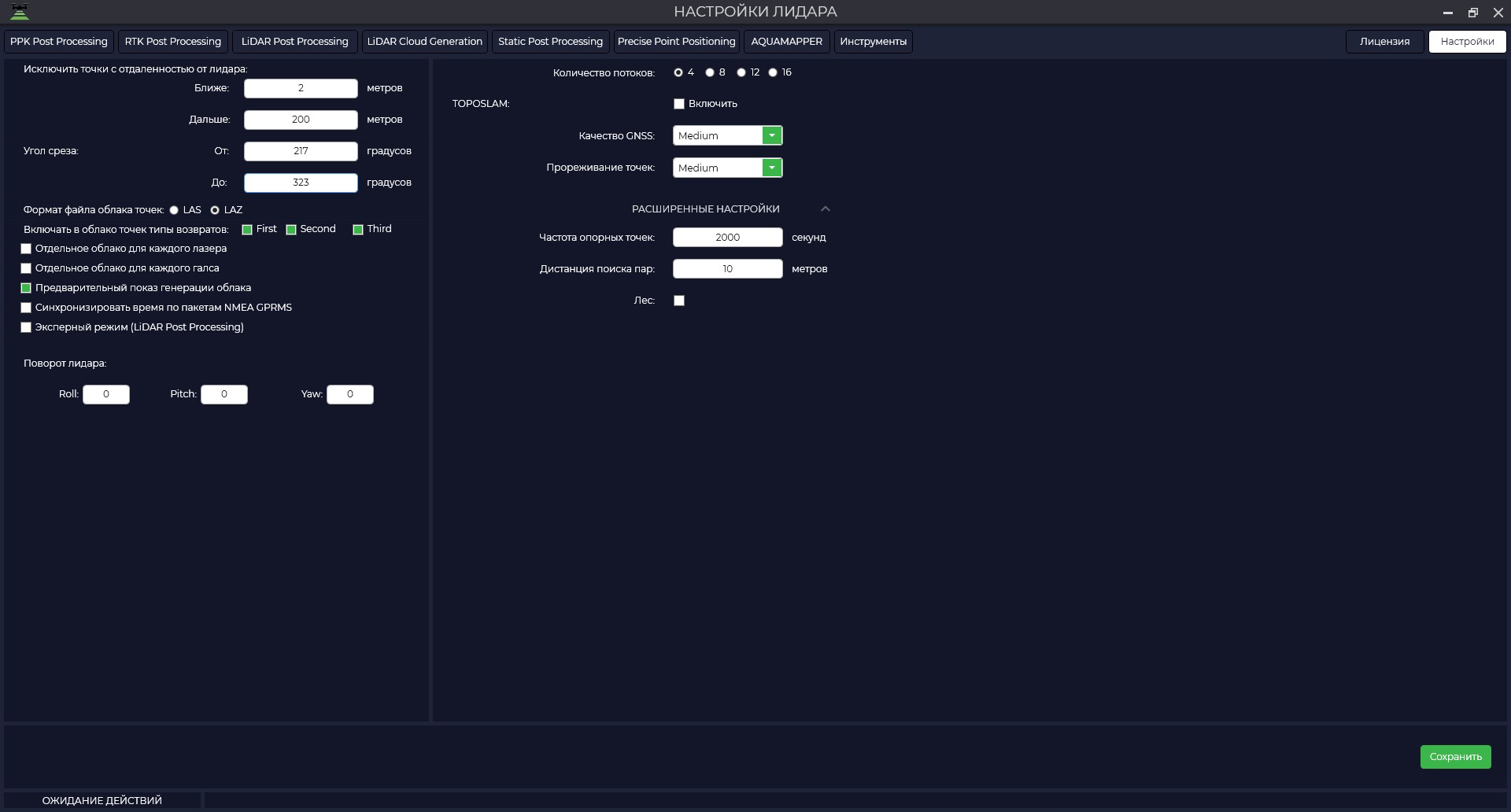 Для этого необходимо перейти к вкладке «Настройки», а затем выбрать пункт «Лидарное сканирование» и в появившемся окне настроить параметры обработки.
Для этого необходимо перейти к вкладке «Настройки», а затем выбрать пункт «Лидарное сканирование» и в появившемся окне настроить параметры обработки.
|
|
Исключить точки с отдаленностью от лидара Ближе – расстояние, которое не принимать во внимание при генерации облака точек. Угол среза: Укажите начальный и конечный угол сканирования LiDAR. Включать в облако точек типы возвратов – выберите количество отражений, которое вам необходимо или то количество, которое поддерживает ваше оборудование. Предварительный показ генерации облака – просмотр генерации облака точек в режиме реального времени |
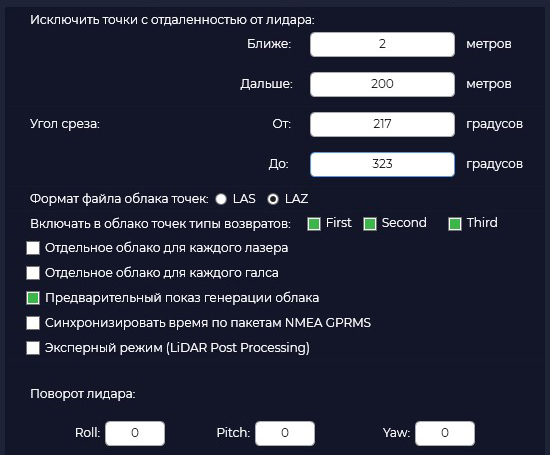
Синхронизировать время по пакетам NMEA GPRMC –
Экспертный режим (LiDAR Post Processing) – это режим, который позволяет указать вручную тип используемого сенсора и IMU.
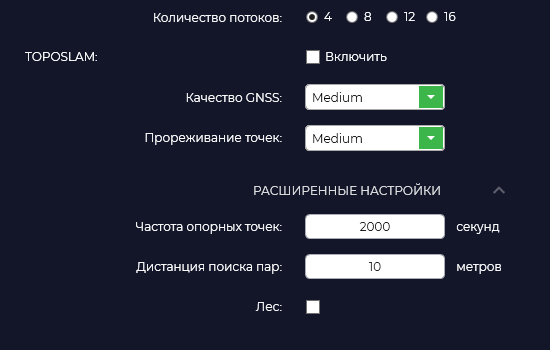
TOPOSLAM предназначен для корректировки облака точек при недостаточно хорошем сигнале GPS. В настоящее время TOPOSLAM поддерживает только наземное сканирование.
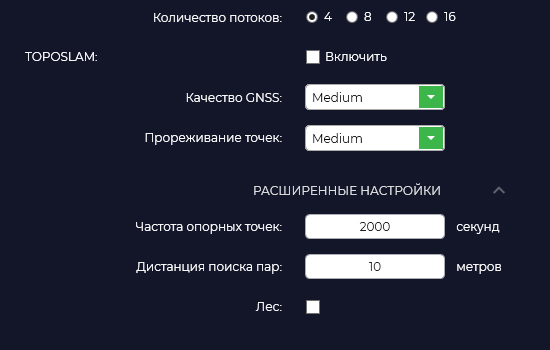
Количество потоков. Укажите количество потоков процессора, которые вы хотели бы задействовать для ускорения обработки данных по технологии SLAM.
Для активации алгоритма TOPOSLAM необходимо поставить флажок напротив соответствующей опции "Включить".
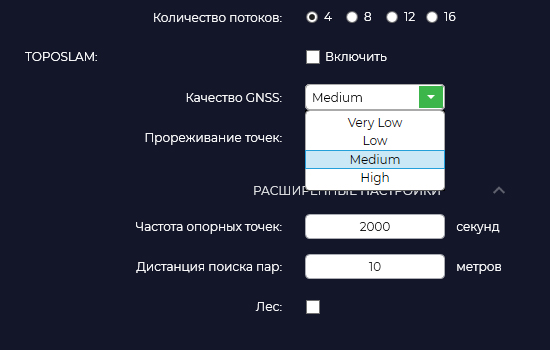
Качество GPS сигнала. В зависимости от качества GPS трека необходимо выбрать соответствующую вкладку. Low – плавающее решение более 70%, Medium – плавающее решение более 50%, High – плавающее решение более 20%. При низком качестве программа разбивает трек на более мелкие сегменты для их дальнейшего взаимного сопоставления.
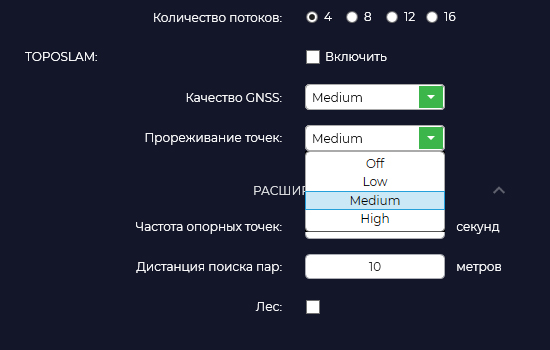
Прореживание точек. Функция пропуска сегментов. Off – не пропускать, Low – пропускать один сегмент после каждого сгенерированного сегмента, Medium – пропускать два сегмента, High - пропускать четыре сегмента. Функция предназначена для ускорения процесса обработки и при нехватки оперативной памяти для больших съемок.
Частота опорных точек.
Дистанция поиска пар.
Лес.