
Preprocessing
Strip Alignment
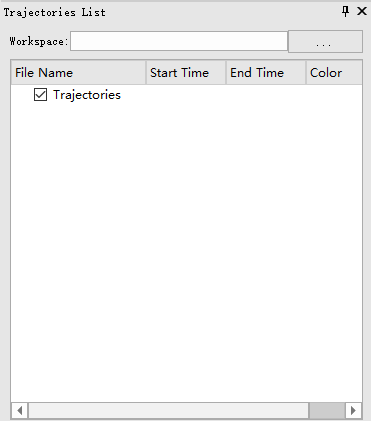
- Откройте модуль Boresight. Нажмите Панель инструментов > Выравнивание полосы > Boresight или Предварительная обработка > Boresight, и откроется соответствующая панель инструментов и виджет «Список траекторий».

-
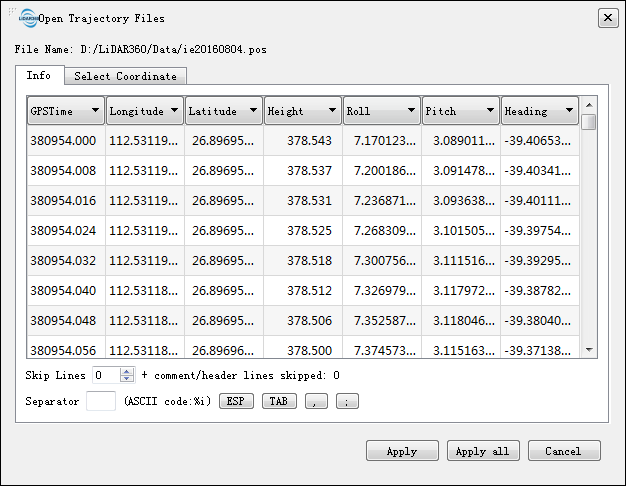
 Открыть файлы траектории. После нажатия на эту кнопку появится окно с запросом на настройку рабочей области.
Открыть файлы траектории. После нажатия на эту кнопку появится окно с запросом на настройку рабочей области.
Выберите рабочее пространство, и откроется диалоговое окно для добавления траекторий.
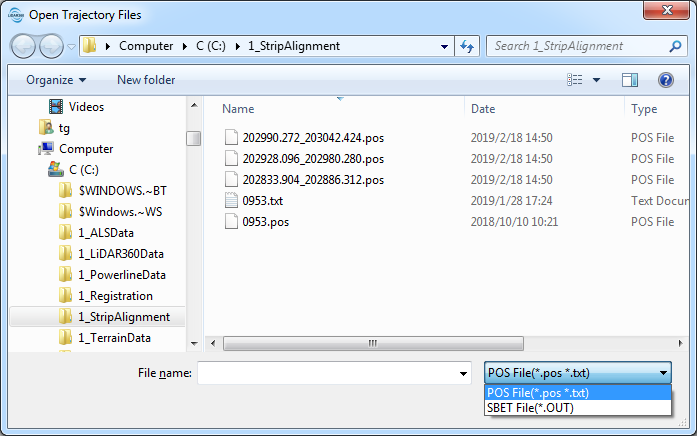
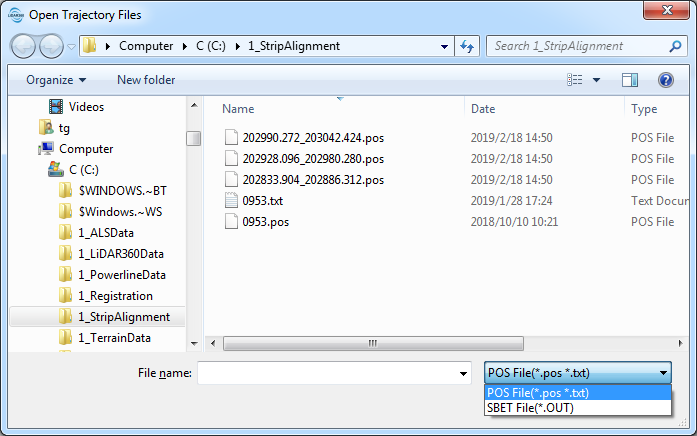
LiDAR360 поддерживает два формата файлов с траекториями: POS(*.pos) (файл в текстовом формате) и SBET(*.out)] (файл в двоичном формате).
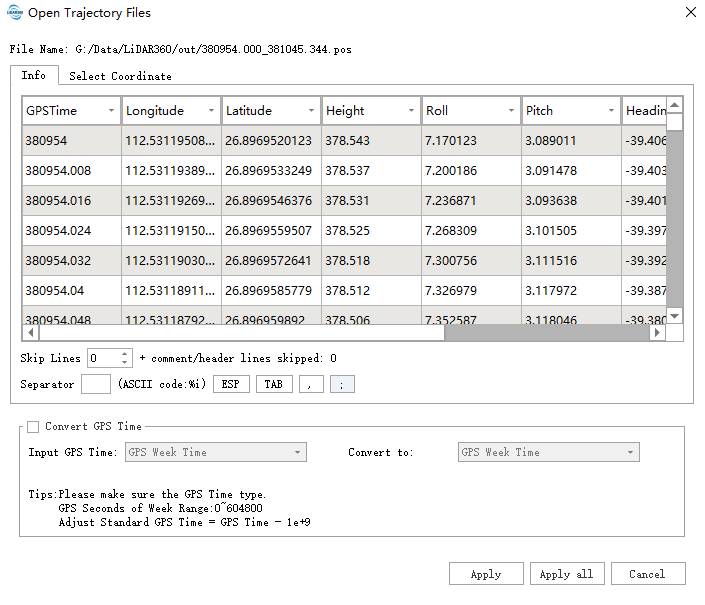
Пример файла POS 1. Если файл POS не содержит информацию о GridX и GridY, пользователь должен указать следующие заголовки (время GPS, долгота, широта, высота, угол крена, угол тангажа и угол рыскания) для столбцов данных. Пример показан ниже.
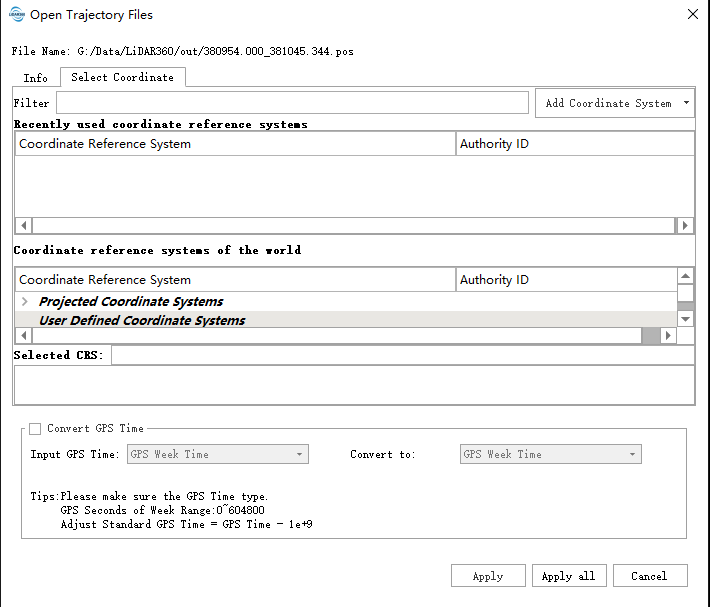
Необходимо выбрать правильную систему координат проекции, как показано на рисунке ниже.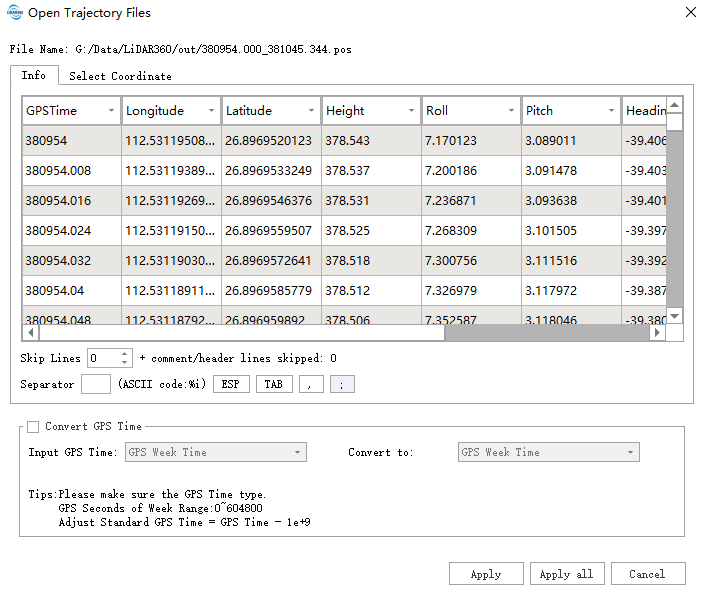
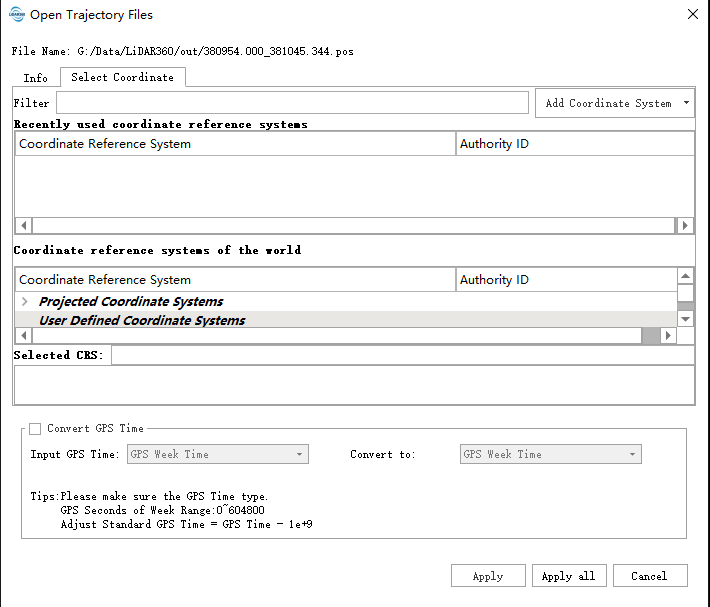
Пример файла POS 2. Если файл POS содержит информацию о GridX и GridY, пользователь должен указать следующие заголовки (время по GPS, долгота, широта, высота, угол крена, угол тангажа, угол рыскания, GridX и GridY) для столбцов данных. Пример показан ниже.
Если информация о GridX или GridY неверна, можно использовать Пример файла POS 1.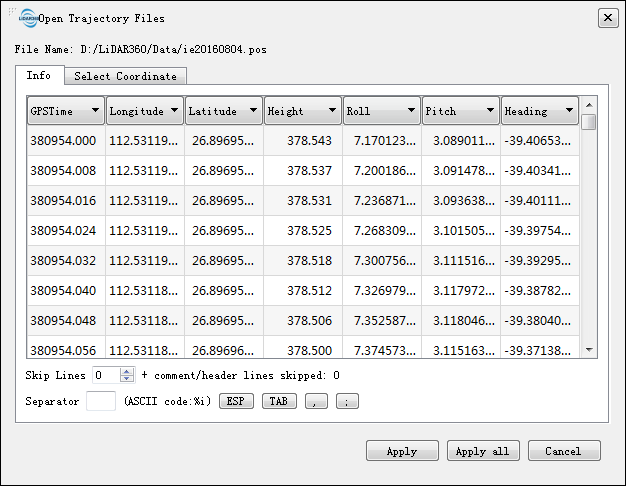
В обоих примерах нажмите «Применить», чтобы текущие настройки применились к текущему файлу траектории. Если вы нажмете «Применить ко всем», текущие настройки повлияют на все файлы траекторий.
Информация о добавленных траекториях будет отображаться в виджете «Список траекторий». (Необязательно) Нажмите , чтобы настроить рабочее пространство.
, чтобы настроить рабочее пространство.
-
 Выбор точки: щёлкните левой кнопкой мыши по определённой точке на траектории, и отобразится информация об этой точке.
Выбор точки: щёлкните левой кнопкой мыши по определённой точке на траектории, и отобразится информация об этой точке.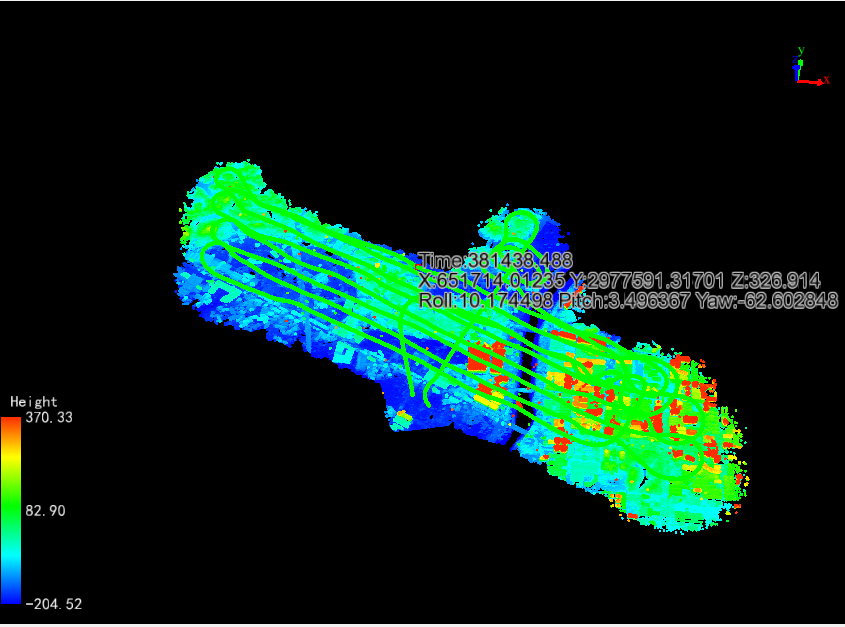
-
Выбор сегмента
4.1 Автоматическое разделение траектории
- Нажмите кнопку Автоматическое разделение траектории
 , чтобы открыть диалоговое окно с параметрами автоматического разделения.
, чтобы открыть диалоговое окно с параметрами автоматического разделения.
- Нажмите кнопку Автоматическое разделение траектории

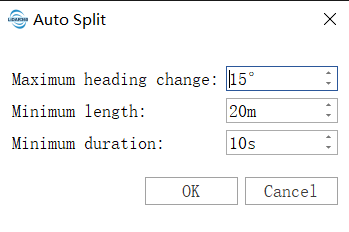
- Установите параметры и нажмите ОК, чтобы начать автоматическое разделение.
- Настройки параметров
- Максимальное изменение курса: изменение угла курса автоматически выделенного сегмента траектории не превышает установленного значения.
- Минимальная длина: минимальная длина автоматически выделенного сегмента траектории не меньше установленного значения.
-
Минимальная продолжительность: продолжительность автоматически выделенного сегмента траектории не меньше установленного значения.
4.2 Выбор по полигону
- Нажмите
 кнопку «Нарисовать многоугольник».
кнопку «Нарисовать многоугольник». - Щелкните левой кнопкой мыши, чтобы создать пользовательский многоугольник в окне просмотра.
-
Нажмите
 кнопку «Выделить многоугольником», чтобы выделить отрезок в области пользовательского многоугольника.
кнопку «Выделить многоугольником», чтобы выделить отрезок в области пользовательского многоугольника.4.3 Выделение по Буршу
- Нажмите
 кнопку «Выделить по траектории».
кнопку «Выделить по траектории». - Щелкните левой кнопкой мыши, чтобы выбрать начальную точку траектории.
-
Выберите конечную точку траектории, и будет выделена траектория между начальной и конечной точками.
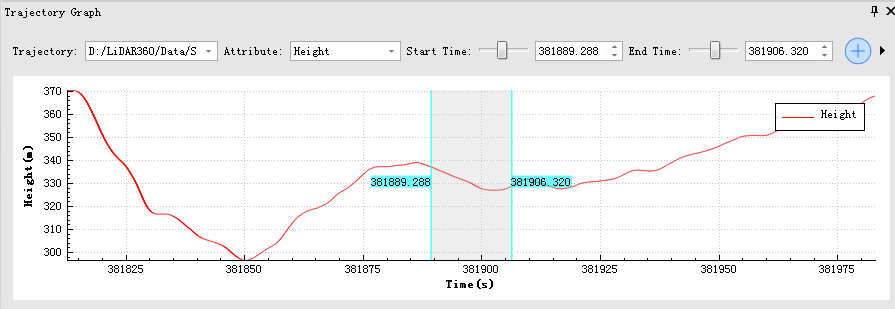
4.4 Выбор по графику траектории
- Нажмите
 кнопку «Выбрать по графику», чтобы открыть график траектории.
кнопку «Выбрать по графику», чтобы открыть график траектории.
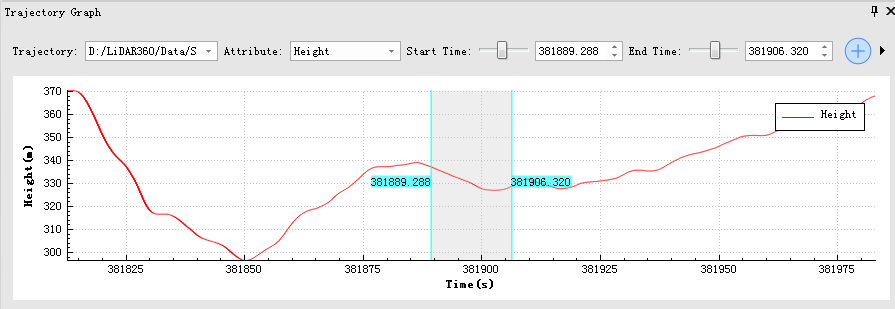
- (Необязательно) Выберите траекторию в поле выбора траектории. На графике будет отображён выбранный сегмент траектории и сама траектория.
- (Необязательно) Выберите атрибут. Пользователи могут выбрать различные режимы отображения, в том числе отображение по высоте, отображение по заводским настройкам качества, отображение по крену, отображение по тангажу, отображение по курсу и отображение по скорости.
- Выберите время начала и время окончания с помощью полос прокрутки.
- Нажмите
 , чтобы добавить новый сегмент.
, чтобы добавить новый сегмент. -
(Необязательно) Измените диапазон отображения. По умолчанию вся информация о траектории в любой момент времени отображается на графике траектории. Прокрутите колесико мыши вверх или вниз, чтобы увеличить или уменьшить масштаб графика, нажмите
 , чтобы восстановить отображение по умолчанию.
, чтобы восстановить отображение по умолчанию.Все выбранные сегменты будут отображаться в виджете «Список траекторий».
- Нажмите
-
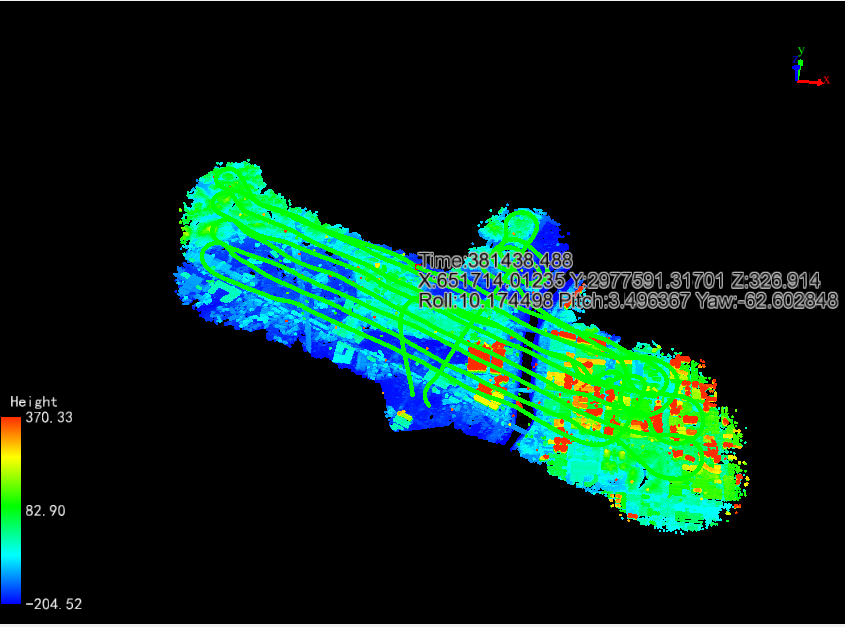
Разделение траекторий. Нажмите эту кнопку, чтобы разделить исходные траектории на выбранные сегменты. Новые сгенерированные траектории будут сохранены в рабочей области в формате POS-файлов и названы в соответствии с временем начала и окончания GPS-отслеживания траектории. Пример названия нового файла: «GPSStartTime_GPSEndTime.POS». Результат разделения показан ниже.
-
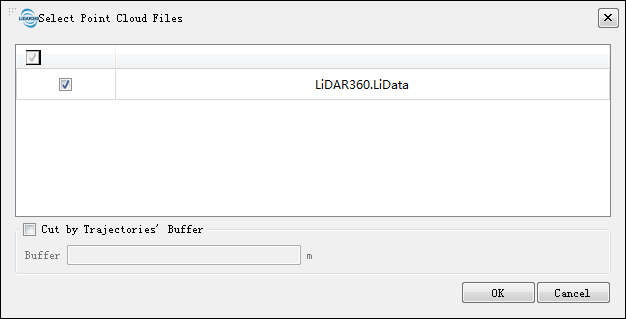
 Облако точек отсечения на основе траекторий.
Облако точек отсечения на основе траекторий.-
6.1 Нажмите на кнопку, чтобы открыть диалоговое окно.
Выберите файлы с данными облака точек, которые нужно обрезать. Установите флажок «Обрезать по буферу траекторий» и задайте нужный параметр Буфер.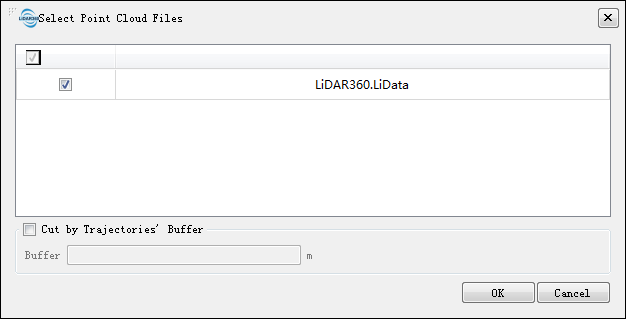
-
6.2 Нажмите «ОК». LiDAR360 разделит облако точек по траекториям и отобразит соответствующую скорость процесса. Результаты разделения будут сохранены, а имя облака точек будет совпадать с именем соответствующего файла POS. Появится диалоговое окно с вопросом, нужно ли загружать результаты.
-
-
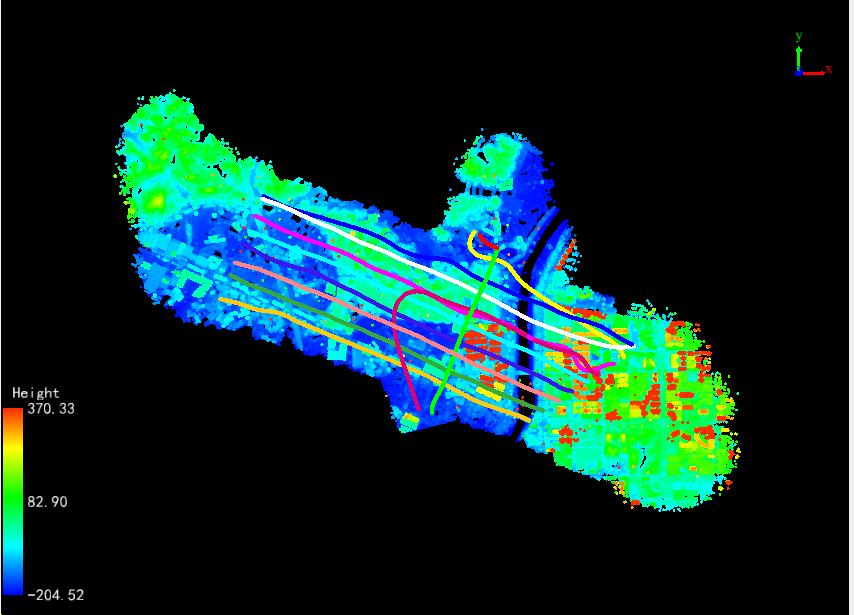
 Совпадение облака точек и траектории: нажмите эту кнопку, чтобы данные облака точек и соответствующая траектория отображались одним цветом.
Совпадение облака точек и траектории: нажмите эту кнопку, чтобы данные облака точек и соответствующая траектория отображались одним цветом.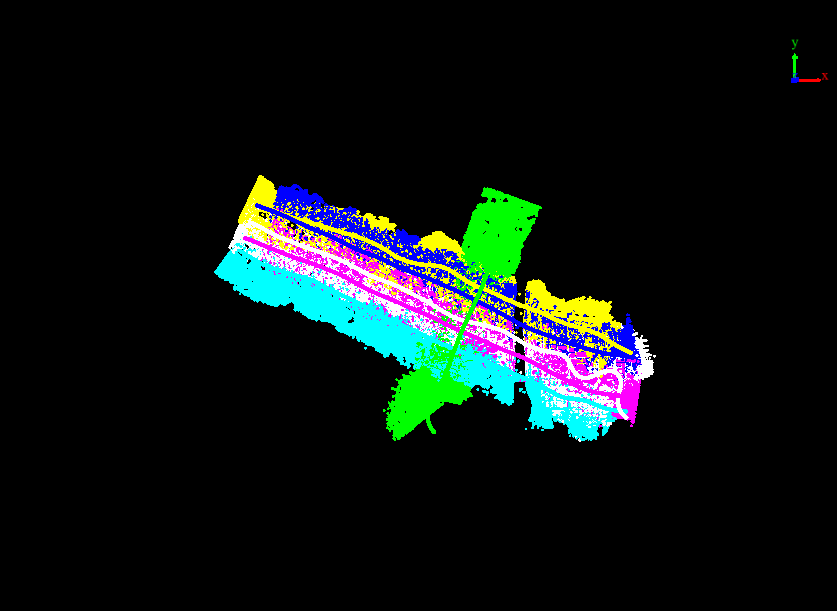
-
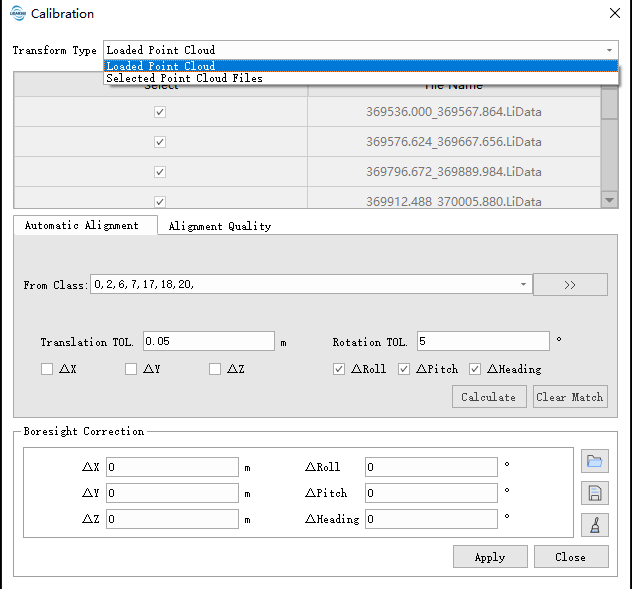
 Калибровка: нажмите эту кнопку, чтобы открыть диалоговое окно.
Калибровка: нажмите эту кнопку, чтобы открыть диалоговое окно.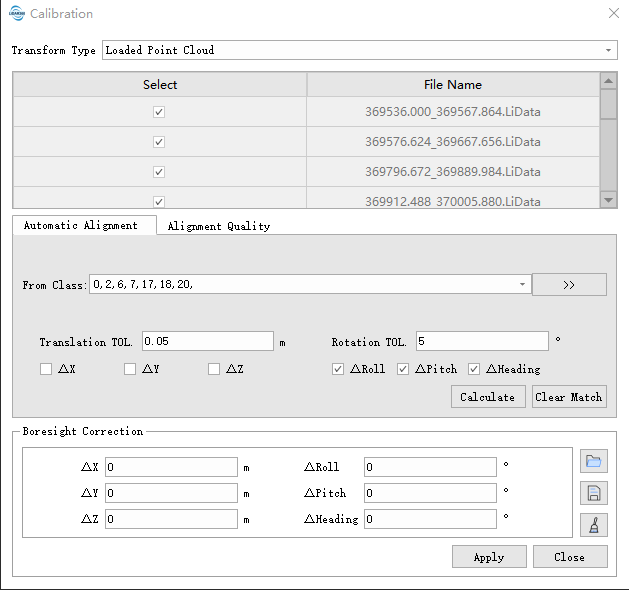
-
8.1 Эта функция применяется для корректировки ошибки прицеливания, которая может быть рассчитана автоматически (автоматическое выравнивание) или введена вручную (ручное выравнивание).
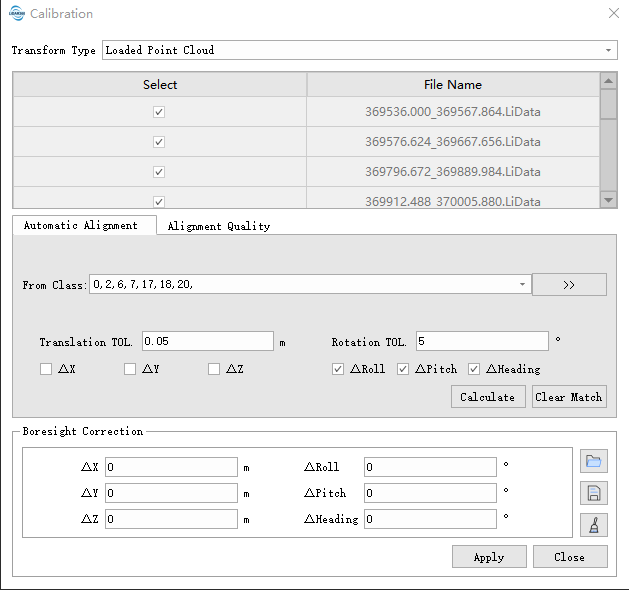
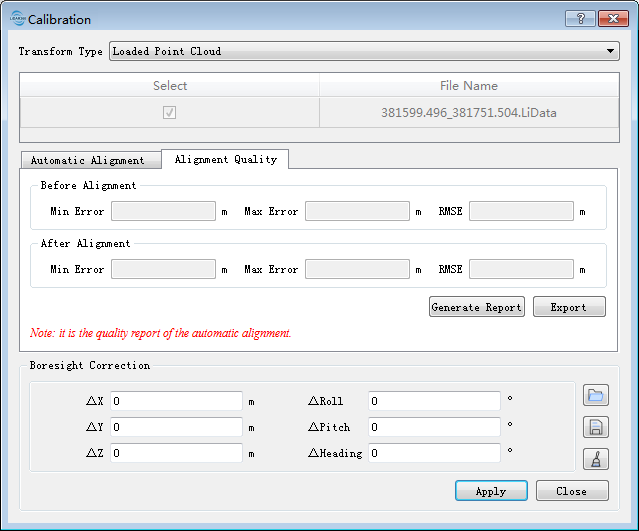
Автоматическое Выравнивание:Выберите ошибку прицеливания, которую нужно исправить, и установите допуск на смещение и допуск на поворот. Нажмите «Рассчитать», чтобы автоматически определить ошибку прицеливания. Результат отобразится в разделе «Коррекция прицеливания». Нажмите «Очистить сопоставление», чтобы удалить информацию о сопоставлении. После изменения соответствующих параметров пользователи могут снова рассчитать параметры выравнивания. После автоматического выравнивания LiDAR360 определит качество выравнивания. Качество выравнивания будет отображаться на вкладке «Качество выравнивания». Нажмите кнопку «Экспорт», чтобы сохранить информацию о качестве выравнивания, и нажмите кнопку «Создать отчет», чтобы создать отчет о качестве автоматического выравнивания. (Теория коррекции на основе автоматической настройки.)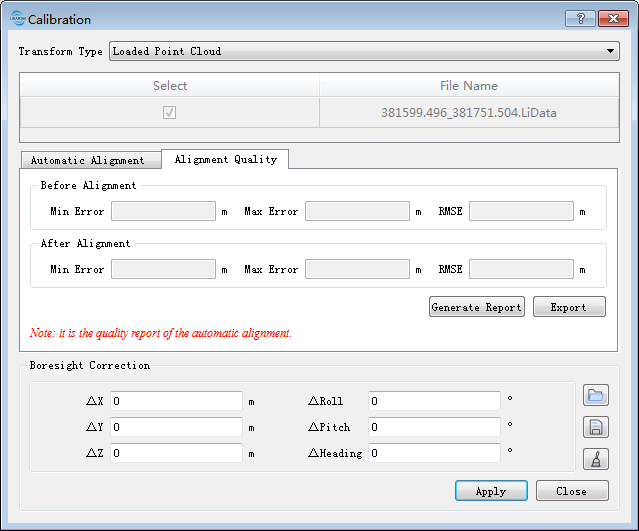 Ручное Выравнивание:Отрегулируйте погрешность прицеливания вручную. (Теория коррекции на основе ручного измерения.)
Ручное Выравнивание:Отрегулируйте погрешность прицеливания вручную. (Теория коррекции на основе ручного измерения.)Нажмите «Применить», и коррекция погрешности будет применена к выбранному Тип преобразования.
-
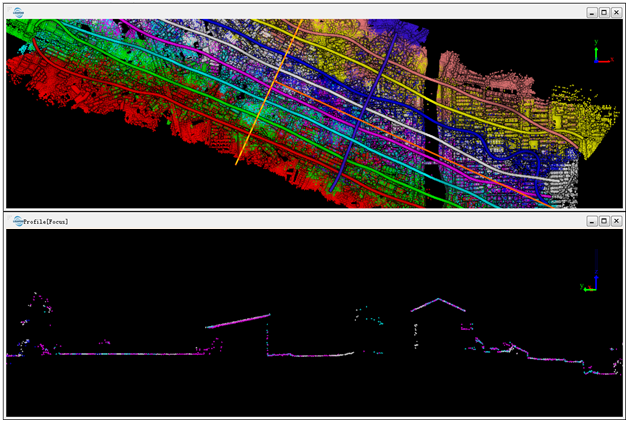
8.2 Как при автоматическом, так и при ручном методе результат коррекции можно проверить в окне профиля.
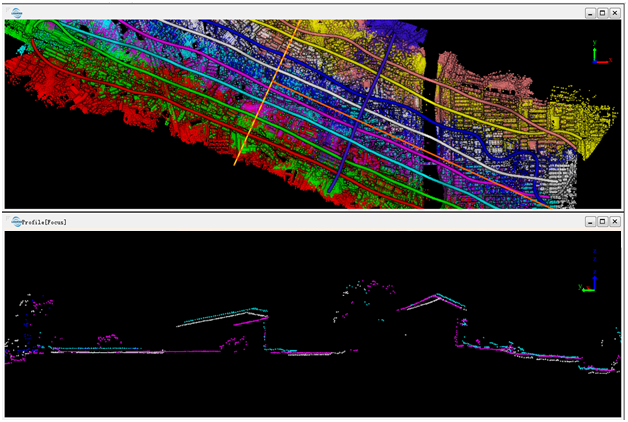 Перед трансформацией
Перед трансформацией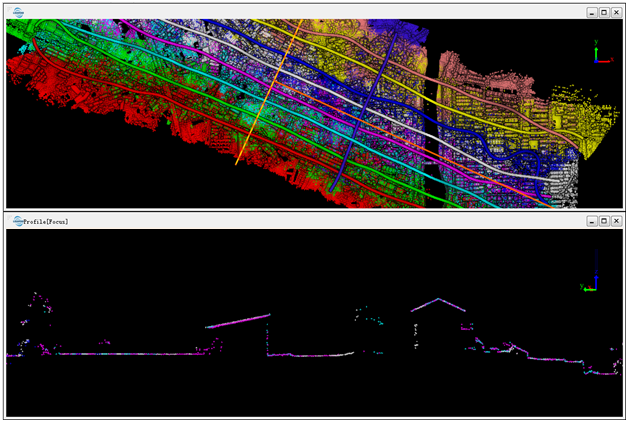 После трансформации
После трансформации -
8.3 Кнопки справа от пункта «Коррекция прицеливания» позволяют выполнять следующие операции: «загрузка из файла», «сохранение в файл» и «очистка».
-
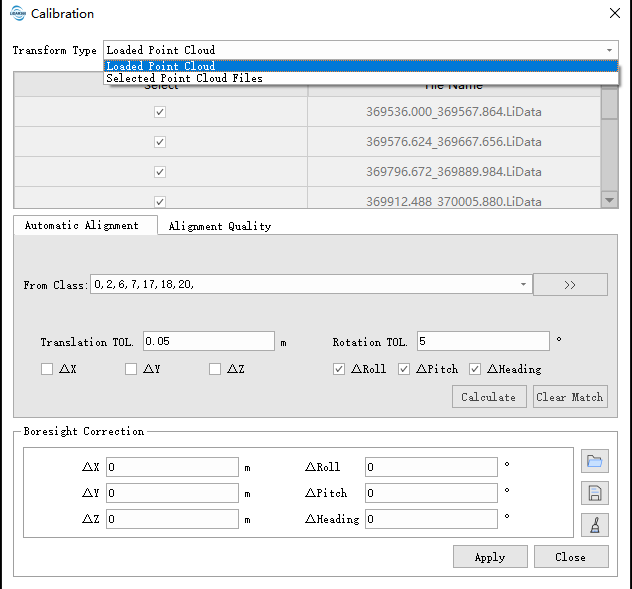
8.4 Если эффект выравнивания достигнут, вы можете изменить тип преобразования с «Загруженное облако точек» на «Выбранные файлы облака точек». Нажмите «Применить», чтобы завершить преобразование.
-
-
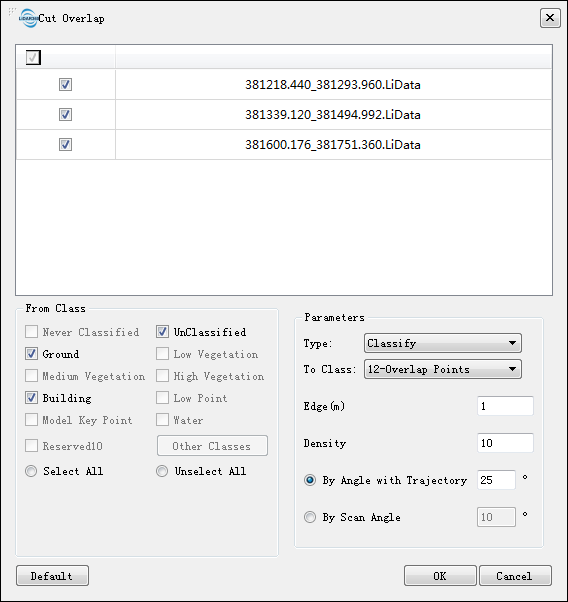
 Вырезать перекрытие: нажмите эту кнопку, чтобы задать параметры вырезания перекрытия. Нажмите кнопку «ОК», после чего лишние точки между перекрывающимися траекториями будут классифицированы или удалены.
Вырезать перекрытие: нажмите эту кнопку, чтобы задать параметры вырезания перекрытия. Нажмите кнопку «ОК», после чего лишние точки между перекрывающимися траекториями будут классифицированы или удалены.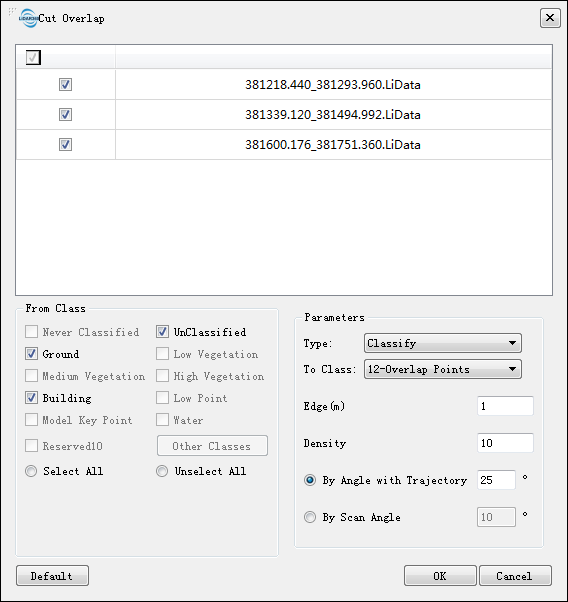
-
Показать Единую Траекторию
- Выберите траекторию в виджете «Список траекторий», щелкните правой кнопкой мыши, чтобы открыть контекстное меню.
- Нажмите кнопку «Показать одну траекторию», цвет выбранной траектории постепенно изменится, а затем траектория несколько раз мигнет.
-
Удаление траекторий или сегментов.
- Выберите траектории или сегменты в виджете «Список траекторий», щелкните правой кнопкой мыши, чтобы открыть контекстное меню.
- Нажмите кнопку «Удалить», и выбранные траектории и сегменты будут удалены.
-
Показать/скрыть траекторию или сегмент Установите/снимите флажок рядом с траекторией или сегментом в виджете «Список траекторий», чтобы показать/скрыть траекторию или сегмент.
-
Отображение траектории Программа поддерживает несколько режимов отображения: 13.1 Отображение по времени (по умолчанию)
- Нажмите
 кнопку, чтобы отобразить траекторию разными цветами в зависимости от времени получения данных. Пользователи могут выбрать цветовую шкалу во всплывающем окне.
кнопку, чтобы отобразить траекторию разными цветами в зависимости от времени получения данных. Пользователи могут выбрать цветовую шкалу во всплывающем окне.
13.2 Отображение по высоте
- Нажмите
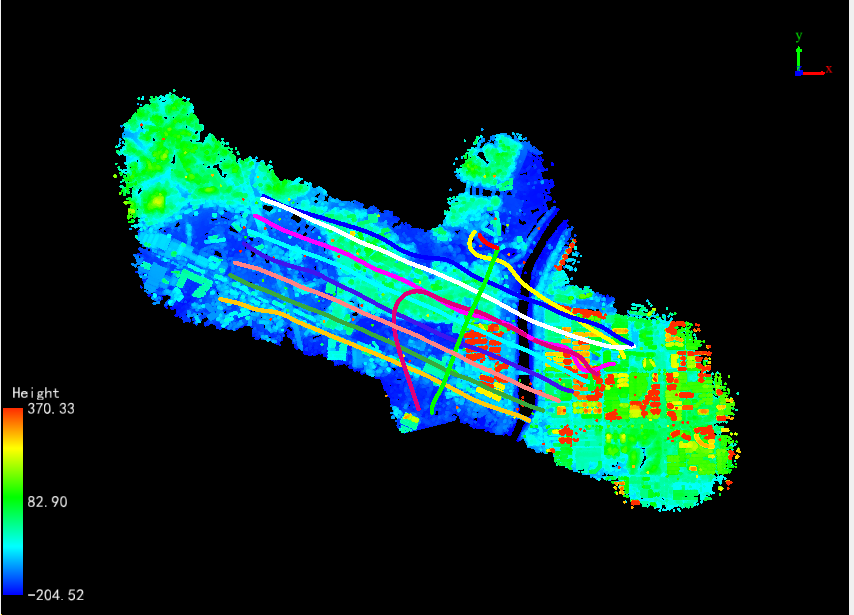
 кнопку, чтобы отобразить траекторию разными цветами в зависимости от высоты. Пользователи могут выбрать цветовую шкалу во всплывающем окне.
кнопку, чтобы отобразить траекторию разными цветами в зависимости от высоты. Пользователи могут выбрать цветовую шкалу во всплывающем окне.
13.3 Отображение по качеству
- Нажмите
 кнопку, и траектория отобразится разными цветами в зависимости от качества. Пользователи могут выбрать цветовую шкалу во всплывающем окне.
кнопку, и траектория отобразится разными цветами в зависимости от качества. Пользователи могут выбрать цветовую шкалу во всплывающем окне.
13.4 Отображение по определённому цвету
- При нажатии на кнопку
 траектория будет отображаться определенным цветом, выбранным пользователем. Цвет можно выбрать во всплывающем окне.
траектория будет отображаться определенным цветом, выбранным пользователем. Цвет можно выбрать во всплывающем окне.
13.5 Показать выбранные сегменты
- При нажатии на кнопку
 несегментированная область будет скрыта, а отображаться будет только выбранная часть сегмента.
несегментированная область будет скрыта, а отображаться будет только выбранная часть сегмента.
- Нажмите
Настройки Параметров
- Параметры облака точек резки на основе траекторий
-
Буфер: оставшееся расстояние с обеих сторон траектории при резке.
-
- Параметры преобразования
-
Ошибка прицеливания
- ΔX/ΔY/ΔZ: параметры коррекции ошибки смещения по линии визирования.
- ΔКрен/ΔТангаж/ΔКурс: параметры коррекции ошибки положения по линии визирования.
- Автоматическое выравнивание: автоматически сопоставляет соответствующие точки между полосами и рассчитывает оптимальное значение коррекции погрешности прицеливания с помощью регулировки.
-
Tolerance of translation: максимальное допустимое отклонение при перемещении по осям ΔX, ΔY, ΔZ. Значение по умолчанию — 0,05 м.
-
Допуск на вращение: максимальный допуск на вращение по осям ΔRoll, ΔPitch, ΔHeading. Значение по умолчанию — 5°.
- Параметры: пользователи могут выбрать, будут ли 3 перемещения и 3 поворота учитываться при корректировке для расчета значений поправки. Для большинства аэрофотоснимков корректировка ΔZ не рекомендуется. По умолчанию все повороты включены, а все перемещения отключены.
-
-
Качество выравнивания: после автоматического расчета выравнивания LiDAR360 определит качество выравнивания и отобразит результат на вкладке с результатами выравнивания.
- Минимальная ошибка: минимальная ошибка при сопоставлении соответствующих точек.
- Максимальная ошибка: максимальная ошибка при сопоставлении соответствующих точек.
- Среднеквадратическая ошибка: среднеквадратическая ошибка при сопоставлении соответствующих точек.
-
Тип преобразования:
- Загруженное облако точек: загруженное облако точек, которое сопоставляется с траекторией в LiDAR360. При применении преобразования изменяется соответствующее облако точек, и эффект преобразования может быть показан в режиме реального времени. При выходе из модуля boresight соответствующее преобразование исключается без сохранения.
- Выбранные файлы облака точек: В этом типе будет активирована область списка файлов в интерфейсе, пользователи могут выбрать, какие файлы облака точек будут участвовать в преобразовании. Затем результаты будут сохранены в файл. Информация не теряется, даже когда модуль наведения выходит из строя.
-
-
Параметры Cut Overlap:
- Тип:
- Классифицировать: классифицировать точки по целевой категории и сохранить результат в исходном файле облака точек.
- Удалить: классифицировать точки по целевой категории, а затем удалить их из исходных данных облака точек (Примечание: если во входном облаке точек есть точки целевой категории, они также будут удалены).
- Из класса: категория целевых точек облака точек.
- Край: размер ячейки сетки (длина) перекрывающейся области. Этот параметр используется для растеризации данных облака точек в перекрывающейся области.
- Плотность: наименьшая плотность точек в ячейке сетки. Если плотность точек меньше заданного порогового значения, эти точки не будут отнесены к избыточным.
- По углу с траекторией: угол между облаком точек и траекторией. Если этот угол больше порогового значения, облако точек будет отнесено к избыточным точкам.
- По углу сканирования: если угол сканирования превышает пороговое значение, облако точек будет отнесено к избыточным точкам. (Примечание: эту функцию можно использовать только в том случае, если угол сканирования зафиксирован в облаке точек.)
- Тип:
Примечание:1. Принцип сопоставления файла облака точек и траектории заключается в следующем: время GPS для всех точек в облаке точек находится в пределах временного интервала GPS для траектории.2. В большинстве случаев влияние X, Y или Z незначительно, в то время как наземные контрольные точки необходимы для более точной установки значения Z. Поэтому по умолчанию при настройке выбираются только крен, тангаж и курс.3. Результат может не удовлетворить пользователя, если файл с данными POS недостаточно точен. В этом случае пользователь может выполнить выравнивание вручную на основе полученного результата.4. Для функции Overlapped необходимы как минимум две пары сопоставленных облаков точек и траекторий.
Trajectory Adjustment
После завершения калибровки по стволу, если в облаке точек по-прежнему наблюдаются наслоения, это может быть связано со значительными ошибками в траектории. Функция корректировки полосы может выполнять постобработку траектории и облака точек для уменьшения ошибок. Корректировка полосы также поддерживает смешанную корректировку облака точек и изображений. Когда облако точек и изображения собираются синхронно с использованием одной и той же системы POS, это улучшает наложение облаков точек друг на друга и на изображения за счёт корректировки траектории, элементов внешней ориентации изображений и ошибок, связанных с углом установки камеры. Файл проекта изображений необязателен; при его добавлении выполняется смешанная корректировка облака точек и изображений с синхронной корректировкой траектории, угла установки камеры и внешней ориентации. Без файла проекта изображений выполняется только корректировка траектории.
Алгоритм корректировки полосы основан на работах Глира и др., 2016; Глира и др., 2019. Основной процесс алгоритма выглядит следующим образом:
- Извлечь поверхностные элементы облака точек и векторы нормали в перекрывающихся областях соседних полос.
- Извлечь поверхностные элементы облака точек и векторы нормали в перекрывающихся областях разреженных точек изображения и облаков точек.
- Сопоставить извлеченные поверхностные элементы в соседних полосах, чтобы получить пары совпадающих поверхностных элементов облака точек.
- Сопоставить разреженные точки изображения и поверхностные элементы, чтобы получить пары совпадающих разреженных точек изображения и поверхностных элементов облака точек.
- Создать модель коррекции ошибок траектории для расчета расстояния вдоль вектора нормали соответствующих пар точек.
-
Используйте метод наименьших квадратов, чтобы минимизировать расстояние между соответствующими парами точек и получить оптимальное решение.
Примечание:
1. Облака точек с разреженными изображениями и сопоставление объектов в облаках точек с лазерными изображениями подвержены влиянию шума в облаках точек с разреженными изображениями, что приводит к несовпадениям. Для облаков точек с разреженными изображениями со значительным уровнем шума рекомендуется использовать фильтрацию шума, например фильтрацию точек линий электропередач, точек разреженной растительности и т. д.2. Точки разреженных изображений и ближайшие к ним объекты на поверхности облака лазерных точек образуют пару совпадений, если выполняются определённые условия. Для сопоставления объектов используются хорошо различимые плоские объекты, в том числе крыши зданий, стены и поверхности земли. В районах с густой растительностью может быть невозможно получить достаточное количество совпадающих объектов, что приведёт к сбою при корректировке.@inproceedings{ автор={Филипп Глира, Норберт Пфайфер и Готфрид Мандльбургер}, название={Точная послойная обработка данных лазерного сканирования с помощью БПЛА, включая зависящую от времени коррекцию ошибок траектории}, книга={Фотограмметрия и дистанционное зондирование}, год={2016}, }
Глира П., Пфайфер Н., Мандльбургер Г. ГИБРИДНАЯ ОРИЕНТАЦИЯ ОБЛАКОВ ТОЧЕК ЛАЗЕРА И АЭРОФОТОСНИМКОВ[J]. 2019. DOI: 10.5194/isprs-annals-IV-2-W5-567-2019.
Нажмите кнопку Предварительная обработка > Корректировка траектории, чтобы открыть интерфейс настройки полосы.
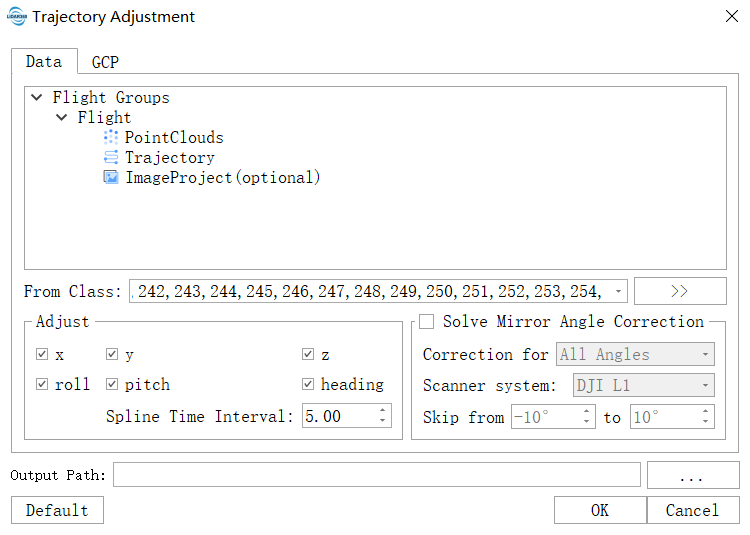
Интерфейс состоит из двух страниц: «Облака точек» для ввода облаков точек, траекторий и дополнительных проектов визуализации, а также страница GCP для импорта файлов с координатами опорных точек.
Добавить данные
Два способа добавления данных:
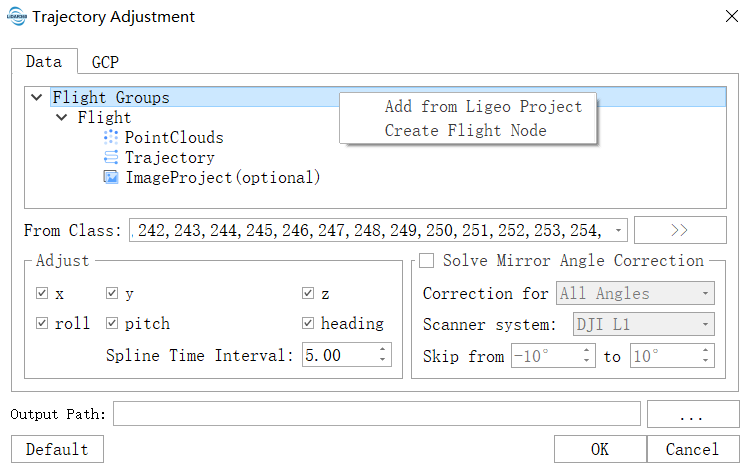
- Добавить из проекта Ligeo: щелкните правой кнопкой мыши по Группам полетов, чтобы импортировать файл проекта Ligeo, который автоматически добавит файлы облака точек и траектории. Поскольку в файле проекта Ligeo не указан файл проекта изображений, при необходимости его нужно добавить в узел Проект изображений
- Добавить группы изображений: создайте дерево каталогов миссии в дереве каталогов Групп полетов, которое включает узлы для облака точек, траектории и проекта изображений. Соответствующие данные можно импортировать через контекстное меню каждого узла.
Примечание. Если импортируется несколько файлов с облаками точек или изображениями, имена файлов должны быть уникальными.
Используйте GCP
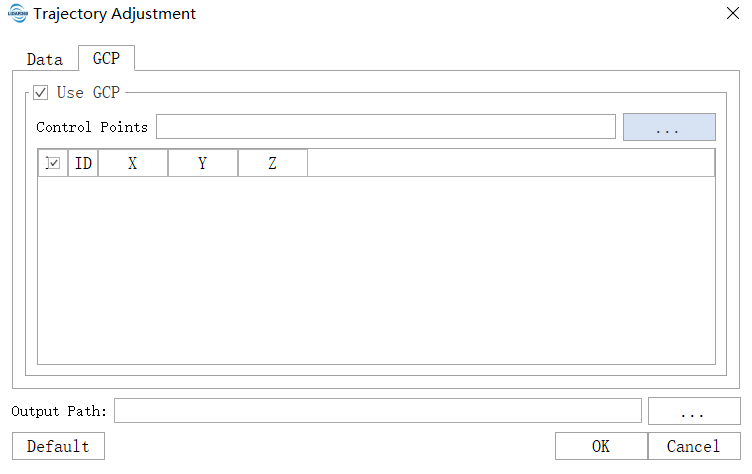
Наземные опорные точки не являются обязательными и могут использоваться для корректировки отклонений по высоте. Извлекаются плоские объекты облака точек в области опорных точек с целью минимизации расстояния от опорной точки до плоского объекта облака точек. Файл с опорными точками должен содержать как минимум следующие поля: название точки, X, Y, Z, а система координат должна соответствовать системе координат облака точек.
Параметры
- Из класса: категория классификации облаков точек. Облако точек, относящееся к выбранной категории, будет использоваться для выделения плоских объектов.
- Настроить
- x/y/z: компоненты положения для коррекции траектории.
- крен/тангаж/курс: угловые компоненты для коррекции траектории (крен, тангаж, рыскание).
- Интервал сплайна (с): траектория колеблется в зависимости от установленного интервала времени; чем короче интервал, тем выше частота колебаний. Если ошибка траектории в определенных областях значительно колеблется, можно установить более короткий интервал; в противном случае можно использовать более длинный интервал. Значение по умолчанию подходит для большинства данных.
- Коррекция Угла Наклона зеркала
- Поправка на: укажите диапазон коррекции угла поворота сканирующего зеркала лазерного сканера.
- Все углы: скорректируйте все углы поворота сканирующего зеркала лазерного сканера.
- Пропустить центральную часть: скорректируйте углы поворота за пределами указанного диапазона, определяемого значением пропуска.
- Пропустить от: установите диапазон углов поворота сканирующего зеркала сканера, которые не будут корректироваться, и скорректируйте углы за пределами этого диапазона.
- Поправка на: укажите диапазон коррекции угла поворота сканирующего зеркала лазерного сканера.
- Путь вывода: путь для хранения выходных файлов после выполнения функции. Выходные файлы включают в себя скорректированные облака точек, траектории, проекты изображений и статистический отчёт в формате HTML.
Примечание. В идеале входными данными для этой функции должен быть полный файл траектории из набора данных. Однако, если полный файл траектории недоступен, можно использовать несколько файлов POS из обрезанных траекторий, но при этом облако точек и время GPS-измерений на траектории должны совпадать, чтобы после коррекции не возникало наложений в локальных областях.
Настройки проекта визуализации
Данные визуализации и данные облака точек собираются синхронно и используют одну и ту же систему POS. С помощью настройки полосы одновременно корректируются траектория, угол установки камеры и элементы внешней ориентации. В файле проекта визуализации должны быть указаны начальный угол установки камеры, погрешность установки, положение, а также углы крена, тангажа и курса на момент получения изображения. Если эта информация не указана в проекте визуализации, ее можно задать в диалоговом окне настроек проекта визуализации.
Щелкните правой кнопкой мыши по файлу LIAEP проекта обработки изображений, чтобы открыть диалоговое окно настроек проекта обработки изображений:
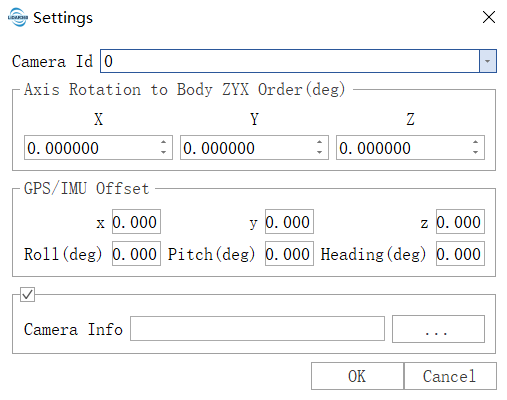
Если в проекте обработки изображений указаны начальный угол установки камеры, погрешность установки, положение, а также углы крена, тангажа и рыскания во время экспозиции изображения, будут отображены соответствующие значения. Если эти значения не указаны, по умолчанию используется значение 0. Значения можно изменить и обновить в файле проекта обработки изображений.
- Идентификатор камеры: Идентификатор камеры.
- Порядок поворота оси относительно оси ZYX корпуса (град): угол установки камеры относительно IMU, обычно уточняемый у производителя.
- Смещение GPS/IMU: Начальное значение ошибки установки камеры относительно IMU.
- x, y, z: смещение камеры относительно IMU (m), не регулируется.
- Крен, тангаж, курс: погрешность установки камеры относительно IMU регулируется.
- Информация о камере: импортируйте файл с точками экспозиции для всех камер из внешних источников. Если файлов с точками экспозиции для нескольких камер несколько, их следует объединить в один файл для импорта. Файл должен содержать как минимум следующие поля: название изображения, долгота, широта, крен, тангаж, курс. Программа выполняет поиск по названию изображения. Если файл с точками экспозиции уже записан в проекте обработки изображений, его не нужно импортировать.
Примечание:
1. Проект визуализации должен быть собран синхронно с облаком точек в рамках одной системы POS.2. Область покрытия проекта обработки изображений должна совпадать с областью покрытия облака точек. Если область покрытия проекта обработки изображений намного больше, чем область покрытия облака точек, может не хватить совпадающих пар, что приведёт к сбою при корректировке.
Исправление ошибки зеркального угла
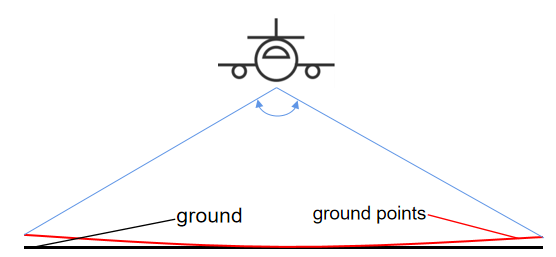
Ошибка зеркального угла — это ошибка угла сканирования лазерного сканера, вызванная недостаточной точностью компонентов сканера или сложной структурой сканирования. Это явление чаще встречается в лёгких и недорогих сканерах (таких как Livox Mid-40 на основе призмы Рисли). Эта ошибка приводит к деформации облака точек, причём чем больше расстояние измерения, тем сильнее деформация. Это влияет на точность положения облака точек и приводит к искривлению облака точек в поперечном сечении вдоль направления сканирования, создавая эффект «улыбающегося лица» (как показано на улыбающемся лице). Исправление ошибки зеркального угла может эффективно устранить эффект «улыбающегося лица» и повысить точность облака точек на краях полосы.
Пусть координаты лазерной точки в системе координат сканера равны $X = \begin{bmatrix} x{s} & y{s} & z{s} \end{bmatrix}^T$, азимутальный угол исходящего луча равен $\Omega$, а угол возвышения — $\Phi$. Тогда $\Omega = arctan(y{s} / x{s})$, а $\Phi = arccos(z{s} / ||X||_{2})$. Поскольку изменение угла сканирования в основном приводит к изменению азимутального угла, а угол возвышения практически не меняется, ошибка угла сканирования проявляется в основном как ошибка азимутального угла. Поскольку ошибка угла сканирования зависит от угла сканирования, азимутальные углы делятся на $N$ групп с интервалом в $1\градус$, а поправка для $i$-й группы составляет $\Delta_i$. Тогда координаты лазерной точки с поправкой на азимутальные углы в системе координат сканера будут следующими:
$\hat{X} = ||X||_{2} \begin{bmatrix} sin(\Omega+\Delta_i)cos\Phi & sin(\Omega+\Delta_i)sin\Phi & cos(\Omega+\Delta_i) \end{bmatrix}^T$
Коррекция угла наклона зеркала — это дополнительная функция для настройки полосы. В настоящее время она поддерживает системы лазерного сканирования DJI серий L1 и X3 и может корректировать все углы или углы, выходящие за пределы заданного диапазона.
Установите флажок Коррекция угла отражения и выберите DJI L1 или серия LiAir в зависимости от типа используемой системы лазерного сканирования. Если вам нужно скорректировать все углы, выберите Все углы. Вы также можете указать начальный и конечный углы, которые нужно пропустить, в диапазоне углов пропуска. Коррекция угла отражения выполняется для каждой полетной миссии, а не для каждой системы лазерного сканирования. Если для нескольких полетных миссий установлен флажок Коррекция угла отражения, коррекция угла отражения будет выполняться для каждой миссии.


Если выполняется коррекция угла наклона зеркала, в отчёте о настройке полосы report.html будет представлена гистограмма значений коррекции угла наклона.
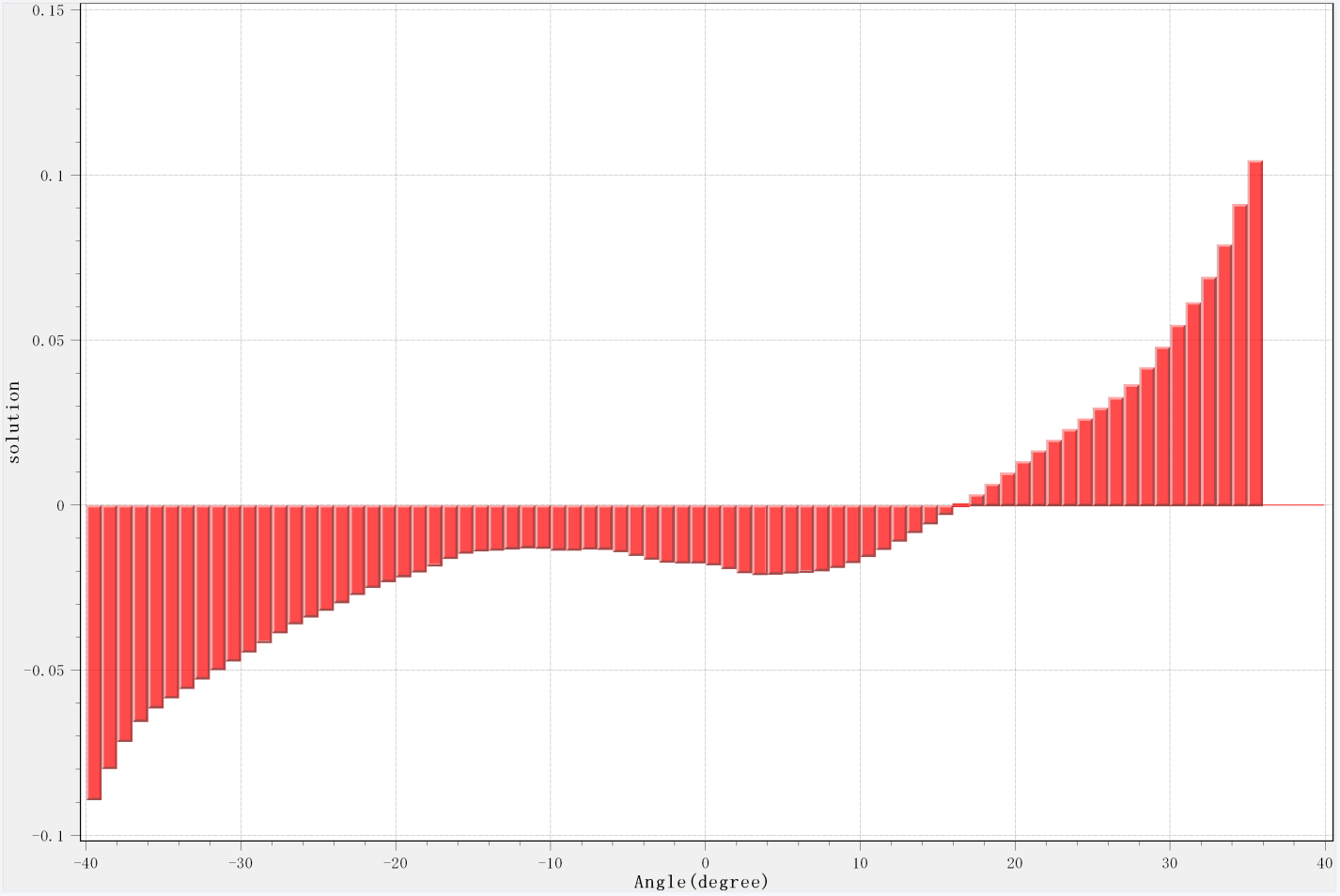
Гистограмма получена путём трёхкратного сглаживания суммы коррекции.
@inproceedings{
author={Brazeal, Ryan G. , B. E. Wilkinson , and H. H. Hochmair},
title={A Rigorous Observation Model for the Risley Prism-Based Livox Mid-40 Lidar Sensor},
booktitle={Sensors},
year={2021},
}
После добавления всех данных нажмите «Подтвердить», и программа автоматически выполнит настройку полосы. После завершения программа выведет скорректированное облако точек, траекторию, проект изображения и статистический отчет, которые будут сохранены в каталоге путь к выходным данным/отчет. Нажмите report.html, чтобы открыть статистический отчет и просмотреть статистические диаграммы и обновленные данные об ошибках при установке камеры.
Примечание: для каждой миссии необходимо добавить соответствующую траекторию и данные облака точек, иначе расчет корректировки будет невозможен.
Поскольку исправленный проект изображения представляет собой разреженное облако точек, его нельзя эффективно наложить на облако точек в режиме просмотра профиля. Параметры исправленного проекта изображения можно использовать для создания плотного облака точек, которое можно наложить на лазерное облако точек.
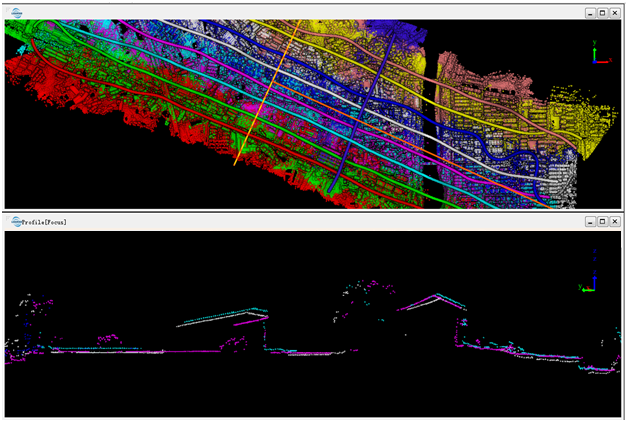
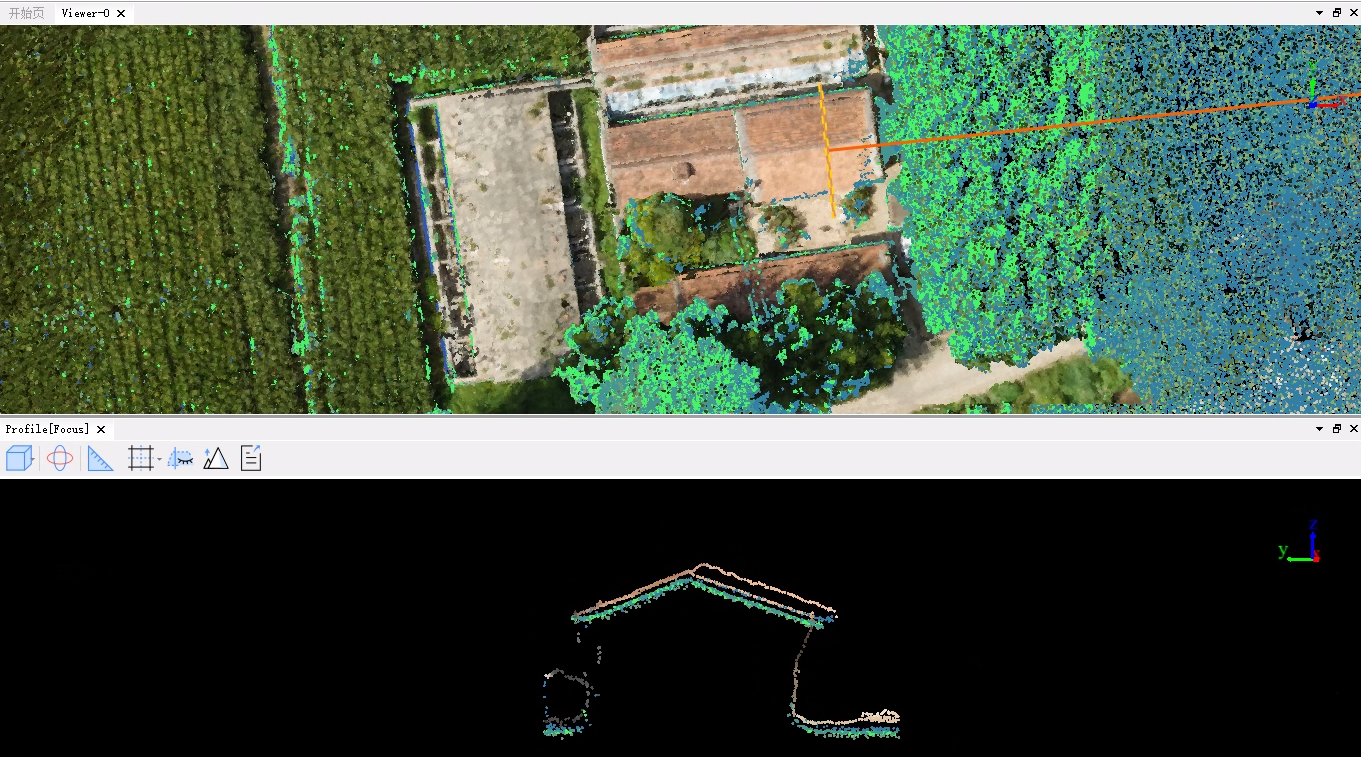
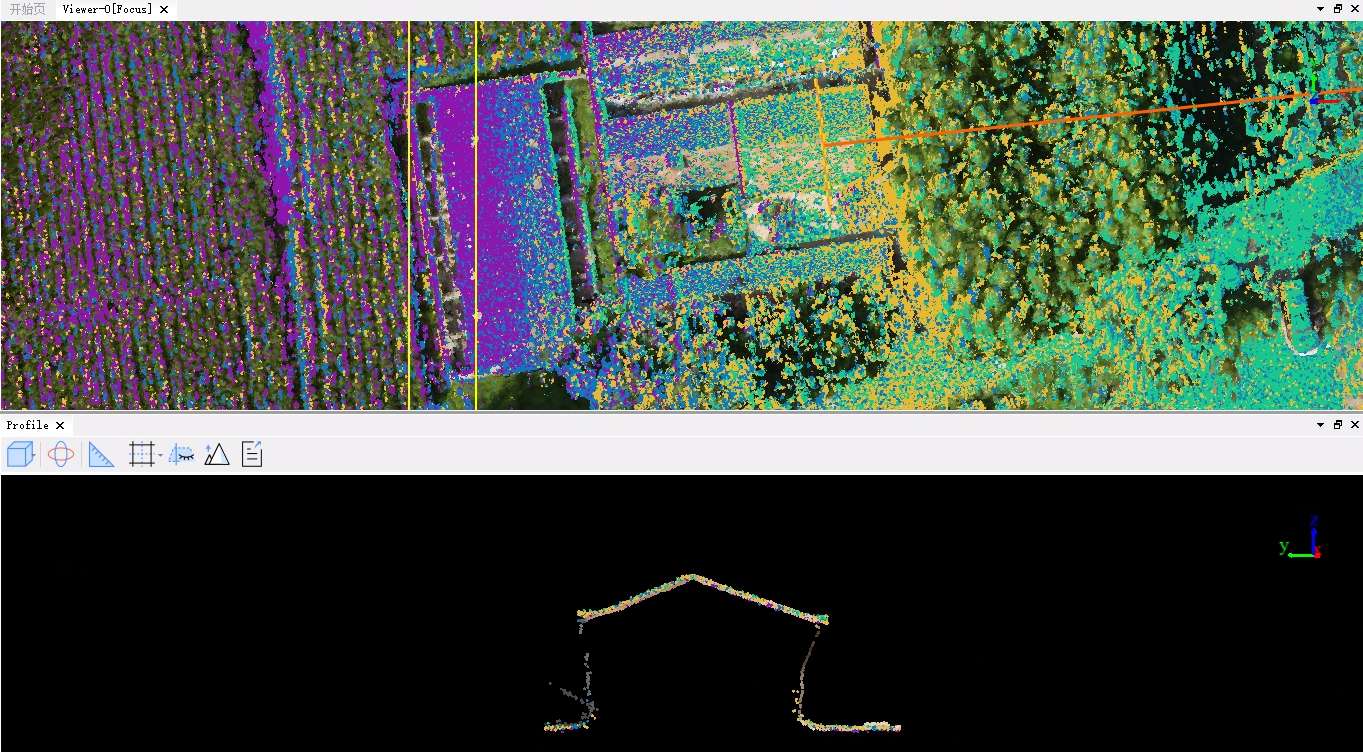
Пользователи могут использовать инструмент «Профиль» для просмотра результатов коррекции облака лазерных точек, как показано на рисунке.
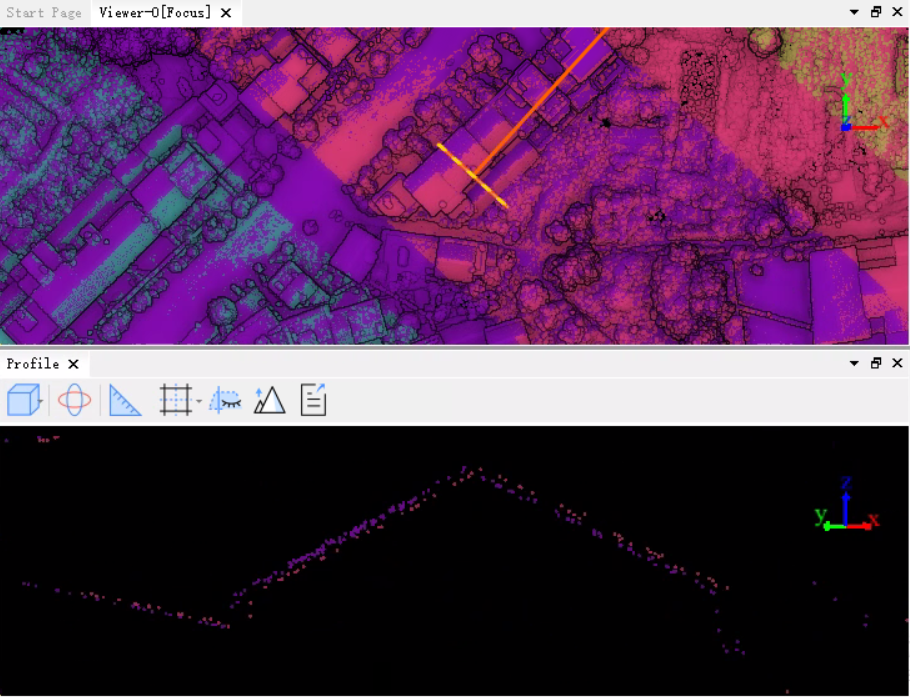
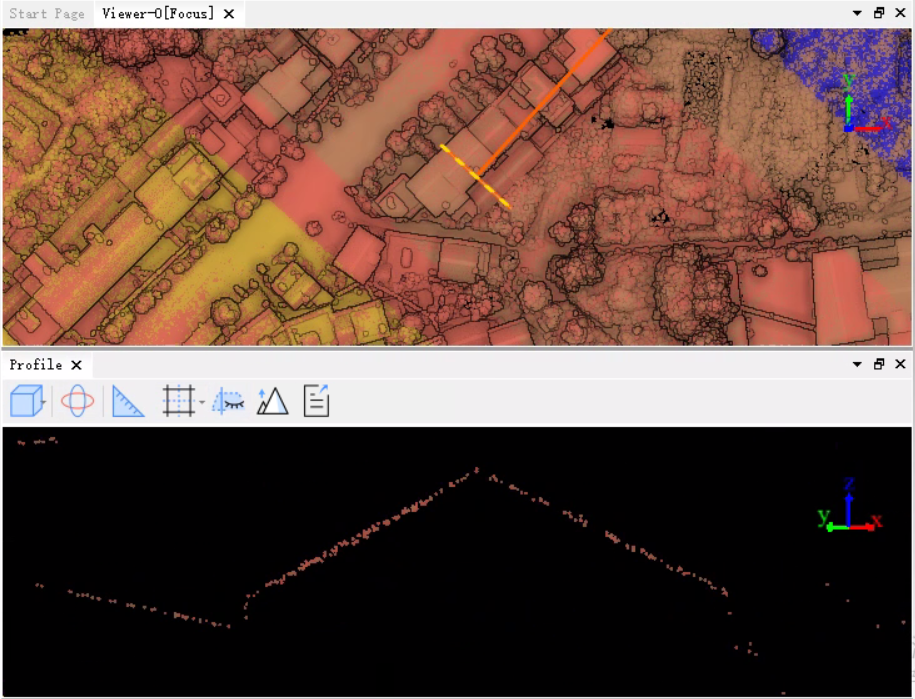
При использовании проекта изображения наложите плотное облако точек до и после коррекции на лазерное облако точек до и после коррекции и используйте инструмент «Профиль» для просмотра эффекта коррекции, как показано на рисунке.
Статистический отчёт
Содержание отчёта зависит от входных данных. Он включает в себя основную информацию о входных данных, настройках параметров, картах траекторий, статистике точности до и после настройки, гистограммах остатков, суммах коррекции ошибок угла наклона зеркала сканера и значениях ошибок установки камеры. Если выполняется только настройка траектории, значения ошибок установки камеры не отображаются. Если коррекция ошибок угла наклона зеркала не включена, суммы коррекции ошибок угла наклона зеркала сканера не отображаются.
No Comments