
Классификация
LiDAR360 можно использовать для классификации неклассифицированного облака точек или для переклассификации уже классифицированных точек.
Классификация наземных точек
Классификация наземных точек — важная операция предварительной обработки облака точек, которую можно реализовать в LiDAR360 с помощью усовершенствованного алгоритма прогрессивной фильтрации сгущения TIN (Zhao et al., 2016).
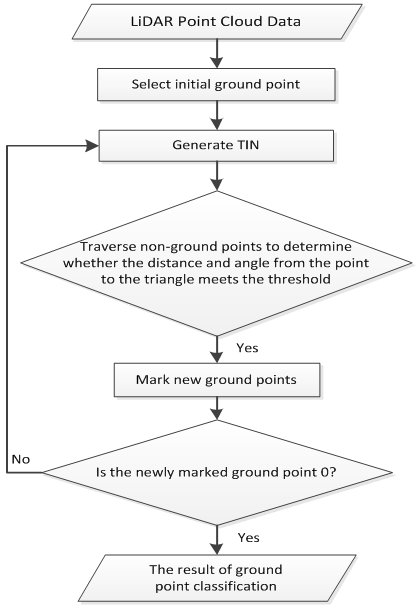
Сначала алгоритм создаёт разреженную триангулированную нерегулярную сеть (TIN) на основе исходных точек, а затем итеративно обрабатывает слои до тех пор, пока не будут классифицированы все наземные точки. Конкретные этапы алгоритма описаны ниже.
- Выбор начальной точки. Если в облаке точек есть здания, то в качестве размера сетки для разбиения облака точек используется максимальный размер здания, а для облака точек без зданий в качестве размера сетки используется значение по умолчанию. В качестве начальной точки выбирается самая нижняя точка в сетке.
- Построение TIN. Первоначальный TIN был построен с использованием начальной точки.
- Процесс итеративной сгустки. Пройдитесь по всем неклассифицированным точкам, запросите треугольники, к которым относится каждая точка, в горизонтальной плоскости проекции. Рассчитайте расстояние (d) от точки до треугольника и максимальный угол между точкой и тремя вершинами треугольника. Как показано на рисунке ниже, расстояние и максимальный угол сравниваются с расстоянием итерации и углом итерации соответственно. Если они меньше соответствующего порогового значения, то точка классифицируется как наземная и добавляется в триангуляцию. Повторяйте этот процесс, пока не будут классифицированы все наземные точки.
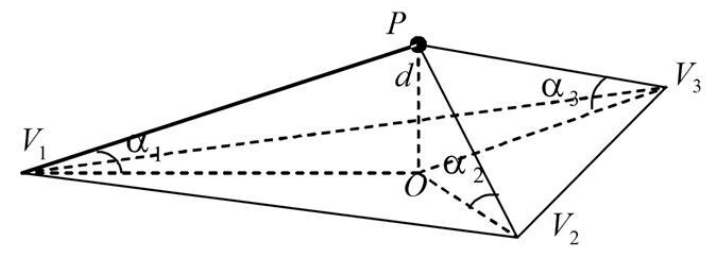
Схема алгоритма показана на рисунке.
Использование
Нажмите Классифицировать > Классифицировать наземные точки
Настройки
- Входные данные: входным файлом могут быть данные одного облака точек или набор данных облака точек, которые необходимо открыть в программе LiDAR360.
- Исходный класс: исходный класс(ы).
- Целевой класс: целевой класс.
- Сценарий (необязательно): для различных сценариев местности можно выбрать равнинную местность, местность с пологим склоном, местность с крутым склоном и горную местность. Выберите различные характеристики местности, соответствующие различным параметрам по умолчанию.
- Максимальный размер здания (м, значение по умолчанию — «20»): максимальная длина края здания, которая существует в облаке точек. Если этот параметр установлен слишком низким, плоская крыша здания может быть принята за рельеф местности. Если в облаке точек есть здание, максимальный размер здания можно измерить с помощью Измерения длины в строке меню. Значение этого параметра должно быть больше измеренного значения. Для данных облака точек без зданий этот параметр может иметь значение по умолчанию 20 м.
- Максимальный угол наклона рельефа (°, значение по умолчанию — «88»): максимальный уклон рельефа, отображаемый в облаке точек. Этот параметр определяет, относятся ли точки, расположенные рядом с точками на земле, к земле. Обычно этот параметр можно оставить по умолчанию.
- Угол итерации (°, значение по умолчанию — "8"): допустимый диапазон углов между неклассифицированными точками и точками на поверхности. Область с большим перепадом высот можно увеличить и соответствующим образом скорректировать расстояние итерации. Обычно этот параметр устанавливается в диапазоне от 6 до 12 градусов.
- Расстояние итерации (м, значение по умолчанию — "1,4"): пороговое расстояние между неклассифицированными точками и треугольником в треугольной сетке. Если неровности рельефа значительны, их можно соответствующим образом увеличить и настроить в соответствии с углом итерации, который обычно составляет 1,2–1,6 метра.
- Уменьшить угол итерации, если длина ребра < (м, значение по умолчанию — "5", необязательно): если длина треугольника точек, подлежащих классификации, меньше порогового значения, угол итерации следует уменьшить. Если этот параметр отмечен, это означает, что, если длина стороны треугольника в точке, которую необходимо классифицировать в сети триангуляции, меньше порогового значения, угол итерации может быть уменьшен для получения более точных точек на местности. Если необходимо получить редкие точки на местности, пороговое значение может быть увеличено.
- Остановить триангуляцию, если длина ребра < (м, значение по умолчанию — "2", необязательно): если длина треугольника, к которому относится классифицируемая точка, меньше порогового значения, то сгущение сети триангуляции прекращается. Это значение позволяет избежать слишком высокой плотности локальных опорных точек. При увеличении этого значения опорные точки будут редкими, и наоборот.
- Только ключевые точки (необязательно): на основе фильтрации точек на земле ключевые точки модели дополнительно выделяются в категорию точек на земле, что позволяет сохранить ключевые точки на местности и выделить точки на ровных участках. Подробнее об использовании этой функции см. в разделе Классификация ключевых точек модели.
Примечание. Поскольку рельеф местности сложный и изменчивый, при использовании этой функции для классификации точек на поверхности необходимо настроить различные параметры, чтобы добиться относительно идеальных результатов. Кроме того, результаты классификации в локальной области можно изменить с помощью Классификации поверхности по выделенным точкам и инструмента Классификации с помощью интерактивного редактирования.
Классификация наземных точек по CSF
Классификация наземных точек — это основная операция при обработке данных облака точек. В этой функции используетсяалгоритм фильтрации наземных точек на основе имитации ткани(фильтр имитации ткани, IPTD(Чжан и др., 2016)).
Этот алгоритм можно разделить на следующие этапы:
- Инвертируйте направление Z в облаке точек. Облако точек разделено на сетку с определенным разрешением в направлении XY, а узлы сетки используются в качестве имитации ткани.
- Установите начальную высоту ткани на максимальное значение в облаке точек и начните итерацию. Во время каждой итерации ткань будет «опускаться» к облаку точек под действием определенной силы тяжести, и одновременно будет рассчитываться соотношение между узлами ткани и облаком точек. Узлы, попавшие в облако точек, не будут перемещаться в течение следующей итерации. Неподвижныйузел будет замедлять опускание окружающих узлов в соответствии со значением жёсткости r.
- После определённого количества итераций рассчитайте соотношение между положением каждой точки и тканью; точки, расстояние от которых до ткани в направлении Z меньше определённого порога, будут отнесены к целевым категориям.
Использование
НажмитеКлассификация > Классифицировать точки опоры по CSF.
Настройки параметров
- Входные данные: Входной файл может представлять собой отдельный файл данных или набор данных облака точек; файл (ы), подлежащий обработке, должен быть открыт в программном обеспечении LiDAR360.
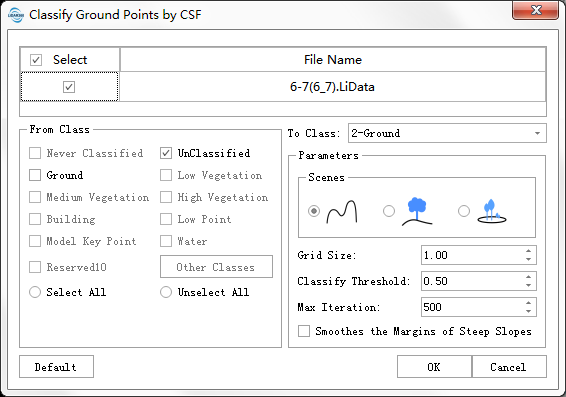
- Из класса: Категории, подлежащие классификации.
- К классу: Целевая категория классификации.
- Сцена: Существует три типа сцен: крутой склон, пологий склон и ровная местность.
- Размер сетки (метры) (по умолчанию "1.0"): Разрешение узлов ткани. 1,0 подходит для большинства облаков точек. Для данных с большими перепадами высот это значение можно уменьшить.
-
Порог классификации (метры) (по умолчанию «0,5»): после завершения итерации точки, расстояние от которых до ткани в
направлении Z меньше этого порога, будут отнесены к целевой категории. - Максимальное количество итераций (по умолчанию «500»): алгоритм завершает итерацию, когда достигает максимального количества итераций или когда все узлы ткани становятся неподвижными.
- Сглаживает края крутых склонов: когда ткань расположена на крутом склоне, из-за внутренних ограничений между узлами ткани она не может плотно прилегать к земле, и алгоритм может выдавать большие погрешности. Если установить этот флажок, можно в некоторой степени устранить эффект крутых склонов. Если в сцене нет крутых склонов, флажок можно снять.
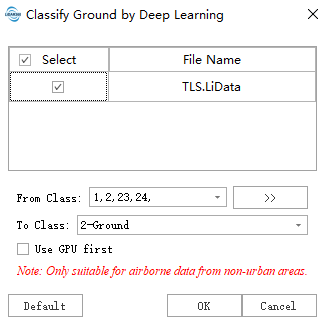
Классификация земли с помощью глубокого обучения
Использует модель глубокого обучения для классификации точек на поверхности в данных облака точек. Точки из исходного класса, соответствующие критериям, будут отнесены к целевому классу. Точки, не отнесённые к целевому классу, сохранят своё исходное значение класса.
Использование
Нажмите Классифицировать > Классифицировать почву с помощью глубокого обучения。
Настройки параметров
- Из класса: класс точек, которые необходимо классифицировать.
- Класс наземных точек: наземные точки.
- В класс: целевой класс для результатов классификации. По умолчанию "2-Ground".
- По умолчанию: нажмите эту кнопку, чтобы восстановить все параметры до значений по умолчанию.
- Сначала использовать графический процессор: использовать ли графический процессор для классификации. Эта функция поддерживает два режима работы: графический процессор и центральный процессор. Если видеокарта компьютерасоответствует требованиям (графический процессор NVIDIA с вычислительными возможностями 3.5 или выше и не менее 4 ГБ доступной видеопамяти во время выполнения), этот параметр будет выбран по умолчанию. Пользователи могут выбиратьe использовать ли графический процессор в зависимости от их потребностей. Работа графического процессора iпримерно в 4 раза быстрее, чем CPU. Если условиеns не соблюдены, графический процессор не может быть использован, и функция по умолчанию будет запущена на центральном процессоре.
Модель обеспечивает точность 94,66 %.
Примечание:
Выходные данные этой функции перезапишут исходные файлы данных.
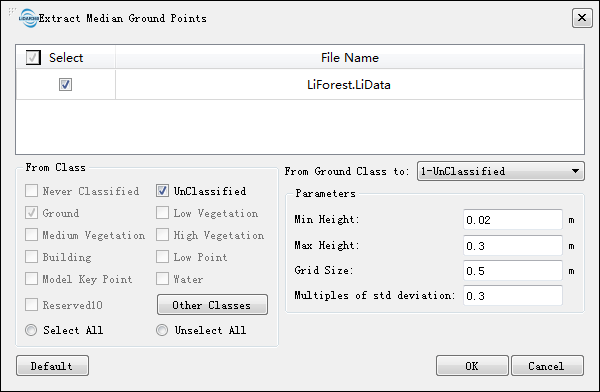
Извлечение медианных точек земной поверхности
Облака точек, созданные на основе данных, полученных с помощью малых летательных аппаратов и беспилотных летательных аппаратов (БПЛА), обычно содержат много точек на поверхности земли, а плотность отдельных точек в этих областях может быть очень высокой. Традиционные методы фильтрации облаков точек, используемые для уменьшения плотности в этих областях, часто приводят к созданию подмножеств точек на поверхности земли с вертикальной толщиной, измеряемой в сантиметрах. Когда эти отфильтрованные облака точек используются для создания трёхмерных сеточных объектов (например, треугольных сеток), результаты, как правило, неудовлетворительны, поскольку трёхмерные смоделированные поверхности выглядят неровными.
Инструмент «Извлечение медианных точек рельефа» можно использовать для получения облака точек рельефа, которое будет тоньше и ровнее, чем облака, полученные с помощью традиционных методов фильтрации облаков точек. Создание такого облака точек рельефа позволяет учитывать точки, находящиеся в более плотном и толстом облаке точек рельефа. Этот метод относится к этапу оптимизации после извлечения исходных точек рельефа. Поэтому данные облака точек сначала необходимо классифицировать с помощью метода классификации точек рельефа. Результаты сравнения до и после использования метода классификации по медианным точкам следующие:
Использование
Перейдите и нажмите на Классификация> Извлечение медианных точек
Настройки
- Входные данные: в инструмент можно ввести данные из одного или нескольких файлов облака точек. Каждое облако точек должно содержать точки, классифицированные как наземные, и быть загруженным в программное обеспечение LiDAR360.
- Из класса: исходный класс(ы), представляющие наземные точки или другие точки, включаются в операцию поиска медианных наземных точек.
- Из класса наземных точек в: классифицируйте целевые наземные точки, которые не соответствуют правилу медианы, в этом классе.
- Минимальная высота (метры, значение по умолчанию - "0.02"): Минимальная высота над наименьшей отметкой точки опоры, найденной во входных файлах, из которых будут взяты точки опоры и использованы для определения средней высоты точки опоры. Точки опоры, находящиеся ниже минимальной высоты, не будут использоваться для определения среднего значения высоты точки опоры. Значение по умолчанию установлено равным 0,02 метра.
- Максимальная высота (метры, значение по умолчанию "0.3"): Максимальная высота над наименьшей отметкой точки опоры, найденной во входных файлах, из которых будут взяты точки опоры и использованы для определения средней высоты точки опоры. Точки опоры, падающие выше максимальной высоты, не будут использоваться для определения среднего значения высоты точки опоры. Значение максимальной высоты по умолчанию установлено равным 0,3 метра.
- Размер сетки (в метрах, значение по умолчанию — «0,5»): размер сетки определяет горизонтальные границы квадратной области, из которой будут извлечены точки рельефа из входного файла (файлов), а затем использованы для определения среднего значения высоты точек рельефа для каждой ячейки сетки. Если количество точек в ячейке сетки меньше заданного пользователем порогового значения, среднее значение высоты точек рельефа для этой ячейки сетки не будет включено в выходной набор данных. Размер сетки по умолчанию составляет 0,5 метра.
- Кратные значения стандартного отклонения (значение по умолчанию — «0,3»): количество и плотность точек на поверхности, извлеченных из облака точек, контролируются заданным пользователем параметром «Кратные значения стандартного отклонения». Значение по умолчанию — 0,3, что означает, что в качестве точек на поверхности извлекается 22 % точек. Кроме того, значение, в 0,5 раза превышающее стандартное отклонение, соответствует 40 % всех точек, классифицированных как опорные. Значение 0,7 соответствует 50 %, 0,9 — 62 %, а 1,5 — 86 %.
- Значение по умолчанию: нажмите, чтобы установить для всех параметров инструмента «Извлечение опорных точек по медиане» значения по умолчанию.
Примечание. Этот алгоритм классификации применим только к более подробным данным о наземных точках, полученным с помощью небольших летательных аппаратов и беспилотных летательных аппаратов (БПЛА). Сначала эти данные необходимо классифицировать по наземным точкам в качестве этапа оптимизации.
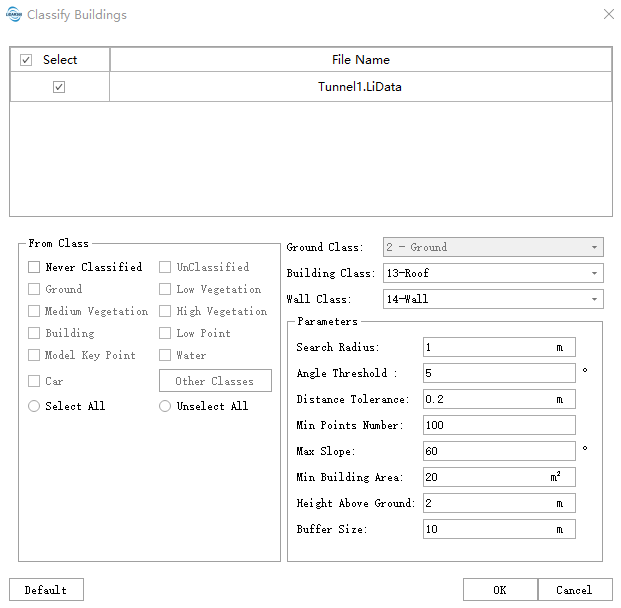
Классификация зданий
Эта функция классифицирует здания и стены в данных облака точек.
Использование
Нажмите Классифицировать > Классифицировать здания
Настройки параметров
- Входные данные: входным файлом может быть один файл с данными облака точек или набор данных облака точек, который должен быть открыт в программе LiDAR360 и уже классифицирован по наземным точкам.
- Из класса: исходный класс(ы).
- Наземный класс: по умолчанию наземная точка относится к 2-му классу.
- Класс здания: укажите номер класса здания.
- Класс стены: укажите номер класса стены.
- Радиус поиска (по умолчанию «1»): радиус окрестности, используемый для вычисления вектора нормали облака точек, обычно в 4–6 раз больше расстояния между точками.
- Порог угла (°) (по умолчанию «5»): порог угла между двумя точками при кластеризации плоскостей. Точки с углами меньше этого значения считаются частью одного кластера.
- Допуск по расстоянию (по умолчанию «0,2»): порог расстояния от точки до плоскости при кластеризации плоскостей. Точки, расстояние между которыми меньше этого значения, считаются частью одного кластера. Обычно это значение немного больше, чем расстояние между точками.
- Минимальное количество точек (по умолчанию «100»): минимальное количество точек, необходимое для определения фасада здания.
- Максимальный уклон (°) (по умолчанию «60»): углы, превышающие это значение, считаются не крышами зданий, а, возможно, стенами или другими категориями.
- Минимальная площадь здания (по умолчанию «20»): минимальная площадь крыши здания. Площади, меньшие этого значения, не считаются частью крыши.
- Высота над землей (по умолчанию «2»): используется для предварительной фильтрации точек на крыше.
- Размер буфера (по умолчанию «10 м»): буферная зона для сегментации облака точек.
- По умолчанию: нажмите эту кнопку, чтобы восстановить все параметры до значений по умолчанию.
Примечание:
1. Для использования этой функции необходимо, чтобы облако точек уже прошло классификацию наземных точек.2. В исходных данных точки, отнесённые к категории «крыша» или «стена», не будут переклассифицированы.
Классификация ключевых точек
Эта функция позволяет уменьшить количество классифицированных точек до определённого уровня. Обычно она используется для создания разреженного набора точек, в котором сохраняются ключевые точки в сложных участках рельефа, а точки на равнинных участках удаляются из извлечённых плотных точек рельефа.
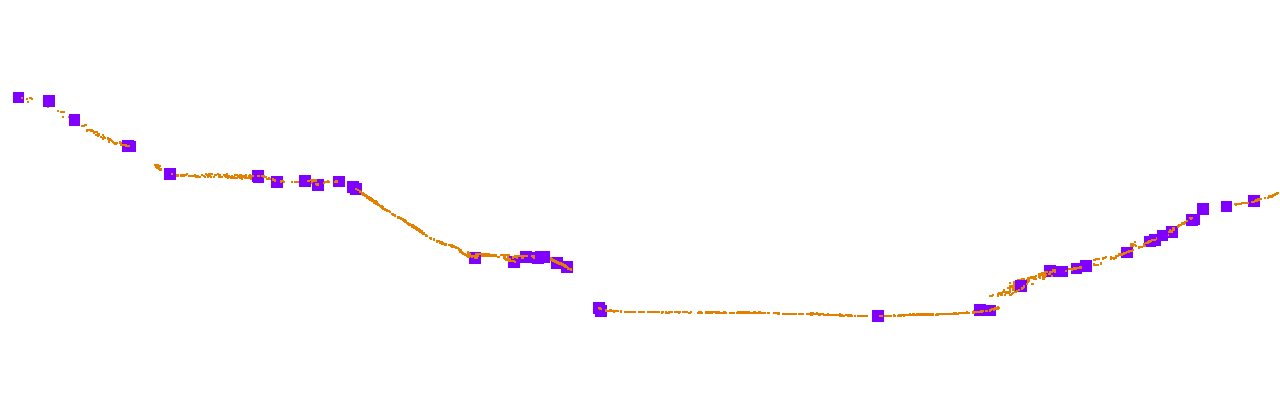
Идея алгоритма заключается в следующем: сначала выполняется разбиение облака точек на сетку, а затем с помощью исходных точек в сетке создаётся начальная сеть триангуляции. В соответствии с порогами верхней и нижней границ в сеть триангуляции добавляются точки, соответствующие заданным условиям. Процесс повторяется до тех пор, пока не будут классифицированы все ключевые точки модели рельефа. На следующем рисунке жёлтая точка — это точка на земле, а фиолетовая точка — ключевая точка модели рельефа.
Использование
Нажмите Классифицировать> Ключевые точки модели.
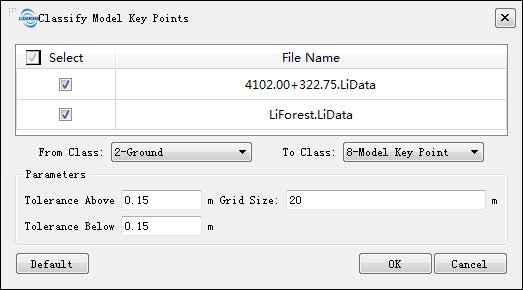
Настройки параметров
- Входные данные: Входной файл может представлять собой отдельный файл данных или набор данных облака точек; файл (ы), подлежащий обработке, должен быть открыт в программном обеспечении LiDAR360.
- Исходная категория: Категории, подлежащие классификации.
- Целевая категория: Целевая категория классификации.
- Допуск выше (m, значение по умолчанию равно "0,15"): максимально допустимое значение допуска по высоте в модели триангуляционной сети, состоящей из исходных точек. Если он превышает этот порог, это рассматривается как ключевой момент. Проще говоря, чем больше значение, тем реже будут расположены ключевые точки модели; чем меньше значение, тем плотнее они будут расположены.
- Допуск ниже (м, значение по умолчанию — «0,15»): максимально допустимый допуск по высоте в модели триангуляционной сети, состоящей из исходных точек. Если значение превышает этот порог, точка считается ключевой. Проще говоря, чем больше значение, тем реже будут расположены ключевые точки модели; чем меньше значение, тем плотнее они будут расположены.
- Размер сетки (м, значение по умолчанию — «20»): это значение используется для обеспечения плотности ключевых точек, извлечённых из модели. Например, если вы хотите, чтобы на каждые 20 метров приходилась хотя бы одна точка, установите значение 20.
- Значение по умолчанию: нажмите на этот инструмент, чтобы восстановить все параметры по умолчанию.
Классифицировать наземные объекты по выбранным параметрам
Из-за сложного и разнообразного рельефа данных облака точек часто бывает трудно добиться хороших результатов классификации с помощью набора параметров при использовании функции «Классифицировать наземные точки», особенно на смешанных участках (горы, равнины и т. д.). Поэтому, если сложный рельеф не позволяет добиться хороших результатов классификации с помощью одного метода, можно использовать панель инструментов для классификации наземных точек в выбранном регионе, чтобы переклассифицировать наземные точки в регионе с неудовлетворительными результатами локальной классификации.
Использование
Сначала загрузите данные в окно, нажмите Классифицировать > Классифицировать землю по выбранному объекту, панель инструментов классификации появится в верхней части окна данных, как показано ниже.

Слева направо: выделение полигона, выделение прямоугольника, выделение сферы, вычитание выделения, очистка выделения, классификация по атрибуту, фильтр коникоидов, фильтр уклона, фильтрация TIN, извлечение медианных точек основания, восстановление выделения и выход. Инструменты «Выделение» и «Обрезка» можно найти в разделе «Выделение» и «Обрезка»
Примечание. Алгоритмы классификации точек на поверхности, предоставляемые функцией классификации точек в выбранной области, включают в себя: коникоидный фильтр, фильтр уклонов, фильтрацию TIN. В зависимости от рельефа следует выбирать разные методы. Как правило, фильтр TIN обеспечивает наиболее стабильный результат, поэтому мы рекомендуем использовать его в первую очередь. Кроме того, лучше обрабатывать каждый файл отдельно.
No Comments