
Фильтр шума
Удаление выбросов из облака точек. В отличие от фильтра удаления выбросов, этот фильтр имеет более высокое качество обработки (фильтрует больше выбросов) на объектах с плоской поверхностью (стены, земля).
Выберите Toolbox> Управление данными> Инструмент облака точек> Фильтр шума
Входные данные настроек: Входные данные могут быть одним файлом облака точек или коллекцией данных облака точек; эти данные, подлежащие обработке, должны быть предварительно открыты в программном обеспечении LiDAR360.
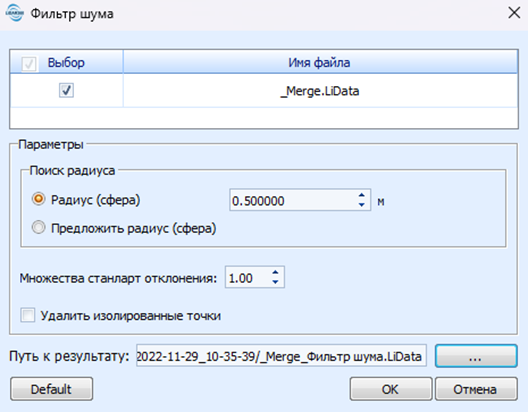
Радиус (значение по умолчанию "0,5 м"): задайте радиус плоскости подгонки. Эту функцию можно использовать, когда пользователям известна приблизительная плотность данных облака точек. Рекомендуемый радиус: Автоматически вычисляет соответствующий радиус поиска в соответствии с входными данными облака точек. Кратные std deviation(Значение по умолчанию "1.0"): Использование относительной ошибки (сигма) в качестве параметра для удаления выбросов. Алгоритм автоматически вычислит стандартное отклонение (stddev) плоскости аппроксимации, окружающей точку P. Если расстояние d, от этой точки до этой плоскости, меньше, чем сигма * stddev, то эта точка, P, будет сохранена. Уменьшение этой относительной погрешности приводит к удалению большего количества точек. И наоборот, будет сохранено больше очков. Изменение этого параметра не повлияет на эффективность. Удалить изолированные точки: Точка будет рассматриваться как изолированная точка, если в пределах радиуса поиска находится менее 4 точек (невозможно создать аппроксимирующую плоскость с менее чем 4 точками). Выходной путь: данные облака точек будут сохранены по этому пути после удаления выбросов.
No Comments