
Область фотограмметрии


Точки маршрута располагаются на одинаковой высоте относительно земли. Эту высоту можно указать напрямую или рассчитать на основе настроек камеры — значения GSD. Рассчитанные параметры (количество проходов, количество снимков и т. д.) отображаются в окне журнала маршрута. Инструмент фотограмметрии доступен для лицензий UgCS PRO, UgCS EXPERT и UgCS ENTERPRISE.
В дополнение ко всем стандартным опциям для инструмента «Фотограмметрия» доступны следующие функции:

Камера — полезная нагрузка, назначенная для профиля. Если для профиля назначено несколько камер, можно выбрать, какую из них использовать.
Установите высоту с помощью:
- (GSD, см) — приблизительное разрешение получаемых изображений (в сантиметрах на пиксель);
- Высота полёта, м — прямая индикация высоты (в метрах).
Перекрытие (%) — соотношение перекрытий в соседних кадрах (следующих за вектором движения, см. схему ниже). Значение устанавливается в диапазоне от 1 % до 90 %.
Боковое перекрытие (%) — соотношение перекрытия в соседних кадрах (расположенных в соседних рядах, см. схему ниже). Значение устанавливается в диапазоне от 1 % до 90 %.
Режим высоты — AMSL, AGL, Smart AGL или дальномер для установки высоты полёта.
Высота AMSL - рассчитывается от самой низкой точки с помощью GSD. Однако количество снимков, необходимое для соблюдения ограничений прямого и бокового перекрытия, рассчитывается с использованием разницы высот между расчетной высотой полета AMSL и самой высокой точкой района.

Допуск по высоте над уровнем земли, м — позволяет летать по прямой траектории над слегка холмистой местностью, указывая, насколько точно БПЛА должен придерживаться заданной высоты над уровнем земли. Для поддержания заданной высоты будут добавлены дополнительные путевые точки, если разница в высоте превышает допуск по высоте над уровнем земли. Чем меньше допуск по высоте над уровнем земли, тем больше будет добавлено путевых точек. Если допуск по высоте над уровнем земли равен 0 (нулю) высота БПЛА будет постоянной на протяжении всего маршрута, но будет добавлено много дополнительных путевых точек.
Угол направления — используется для изменения направления основного процесса сканирования. По умолчанию алгоритм рассчитывает маршрут сканирования в ограниченном полигоне таким образом, чтобы основное сканирование выполнялось в направлении «юг — север».
Переворот, м — добавляет дополнительный сегмент на обоих концах каждой линии съемки, чтобы обеспечить дополнительное пространство для поворотов.
Скорость переворота, м/с — возможность уменьшить/увеличить скорость транспортного средства на сегменте переворота при прохождении поворотов.
Выполнение действия:
- Каждая точка — действия будут генерироваться во всех путевых точках;
- В начале — алгоритм будет генерировать действия только в первой путевой точке;
- Проходы вперед — действия генерируются во всех точках во время прохода, полезная нагрузка отключается на поворотах
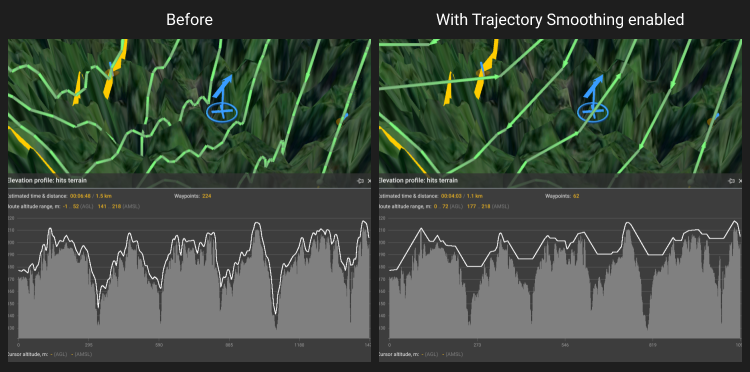
Сглаживание траектории
Включает две опции: «Максимальный наклон» и «Минимальный зазор», которые делают траекторию более плавной за счет ограничения углов наклона и игнорирования зазоров.
Двойная сетка — если включена, к съемке добавляется вторая сетка под углом 90 градусов к первой сетке.
Дополнительные путевые точки — если флаг сброшен, алгоритм генерирует только точки поворота. Если флаг установлен, будут сгенерированы дополнительные путевые точки для съёмки с камеры в зависимости от перекрытия и настроек камеры.
Разрешить частичный расчет — опция, позволяющая рассчитывать маршрут в следующих случаях:
- Участок маршрута, превышающий максимальный AMSL маршрута
- Высота рельефа недоступна в некоторых точках маршрута
- Участок маршрута, превышающий максимальный радиус ограждения
- Участок маршрута в Бесполетной зоне (NFZ)
Камера направлена вперёд — относится к ориентации камеры относительно вектора движения. Флаг предполагает, что камера ориентирована таким образом, что кадры накладываются на вектор движения в верхней части кадра. Если флаг снят, кадры накладываются на боковую границу кадра.
Чтобы переместить/повернуть сегмент — выделите и удерживайте синий круг в центре, чтобы перетащить сегмент в другое место. Выделите и удерживайте край круга, чтобы повернуть весь сегмент.
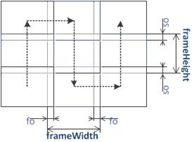
где 'fo' — перекрытие спереди, 'so' — перекрытие сбоку
Расчёт:
- Рассчитайте высоту, необходимую для записи с камеры:
a. heightAgl = ( f GSD sensorWidthPx ) / sensorWidth;
b. heightAgl = ( f GSD sensorHeightPx ) / sensorHeight;
c. Выбрано минимальное значение heightAgl. - Рассчитайте размер кадра:
a. frameWidth = ( sensorWidth heightAgl ) / f;
b. frameHeight = ( sensorHeight heightAgl ) / f.
где 'f' — истинное фокусное расстояние
Область сканирования разделяется на кадры рассчитанного размера с заданным перекрытием. Направление движения выбирается с помощью угла направления. Маршрут формируется в виде «змейки».
- Установить положение камеры — наклон 90
- Установить расстояние до камеры — автоматически