Маршрут
Маршрут — это рассчитанная траектория полёта, основанная на выбранных профилях дрона и полезной нагрузки, выбранных параметрах в каждом наборе инструментов и действиях камеры. Маршрут может состоять из одного или нескольких сегментов.
При расширении списка маршрутов все они сортируются в алфавитном порядке.
Параметры маршрута
Параметры доступны на кнопке «Параметры маршрута»:
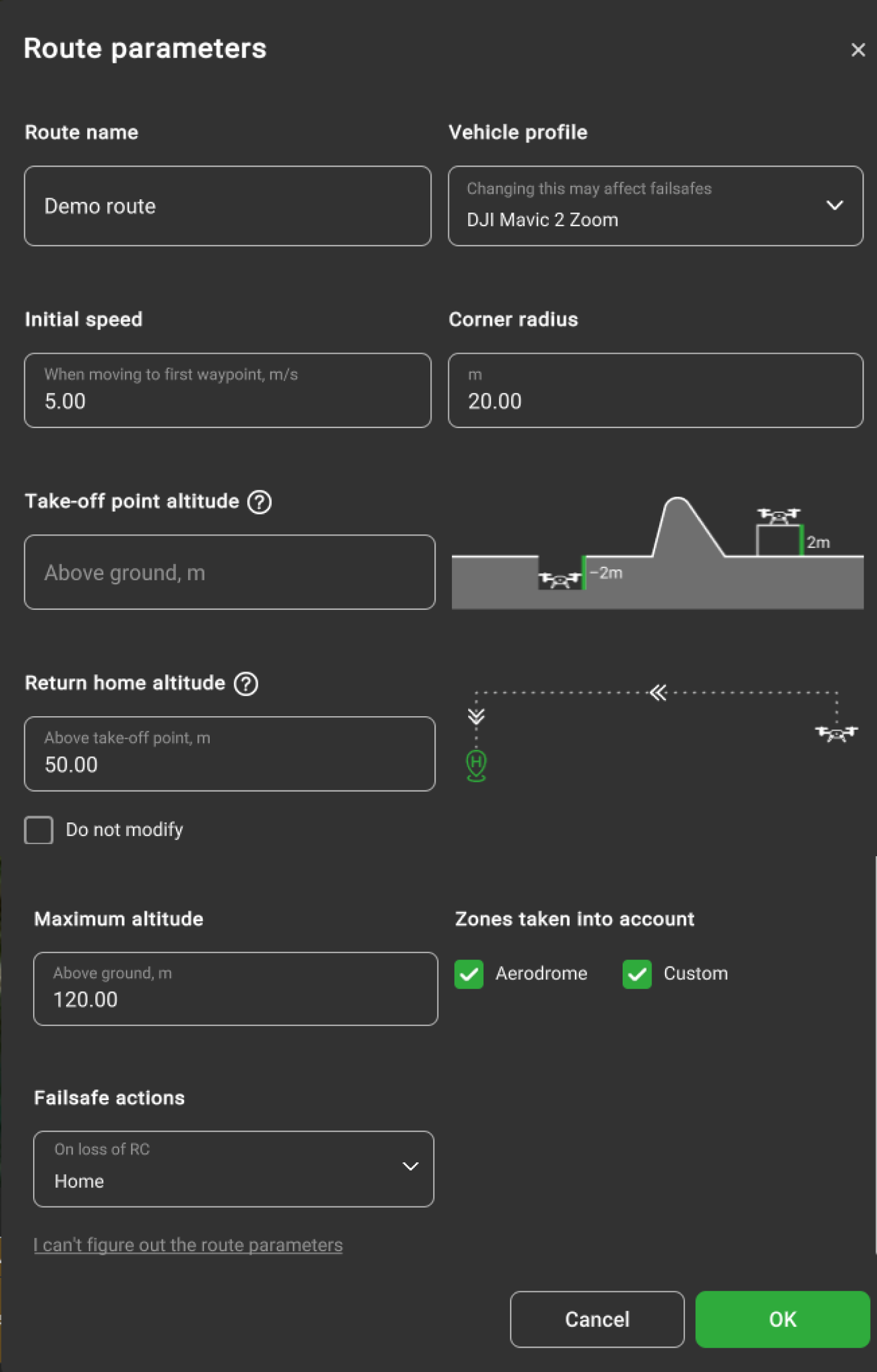
Высота точки взлёта над землёй, м — это реальная высота дрона относительно земли. Если дрон установлен на объекте выше уровня земли или в углублении ниже уровня земли, не указанном в данных о высоте. Высота точки взлёта — важный параметр для расчёта маршрута. Его необходимо использовать, когда транспортное средство взлетает с поверхности, которая находится выше или ниже уровня земли (например, с подиума или крыши здания). Другой случай, когда необходимо использовать параметр «Высота взлёта», — это когда данные о высоте неверны. Например, при осмотре карьера (или кургана), которого нет в модели высот. Если карьера (или кургана) нет в данных о высоте, появится следующее сообщение:
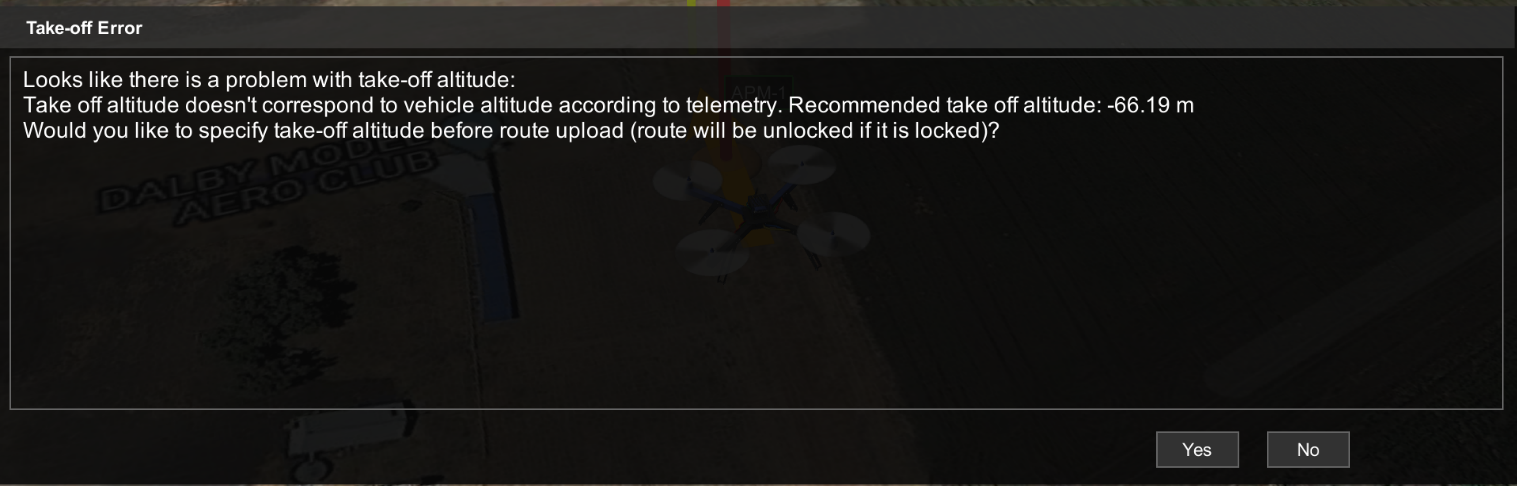
Это сообщение появляется только в том случае, если дрон работает в режиме RTK_FIX.
Место назначения — это точка, в которую должно вернуться транспортное средство в случае срабатывания системы безопасности. Срабатывает автоматически или по команде оператора вернуться домой. К условиям срабатывания системы безопасности обычно относятся чрезвычайные ситуации, такие как потеря радиоуправления или низкий уровень заряда аккумулятора.
Опция «Не изменять» означает, что действия автопилота для этих настроек остаются по умолчанию и не изменяются. Опция находится в раскрывающемся списке для каждого действия Failsafe.
Исходное положение обычно является точкой отсчёта.
Для удобства использования можно просмотреть текущее местоположение транспортного средства, нажав на команду «Сосредоточиться на текущем местоположении» в соответствующем контексте транспортного средства.
Высота возвращения домой, м (над точкой взлёта). Изменение этого параметра повлияет на функцию ручного и автоматического возвращения домой. При возвращении домой дрон поднимется на указанную высоту.
Начальная скорость, м/с — это значение, установленное в профиле дрона по умолчанию, которое определяет скорость от начальной точки до первой точки маршрута, а также до следующей точки маршрута (если установлен флажок «Взлёт до первой точки маршрута»). Пользователь может изменить это значение.
Радиус поворота, м доступен только для дронов DJI. Это значение по умолчанию из профиля дрона, которое определяет кривизну траектории, если маршрут содержит путевые точки Adaptive Bank Turn. Дроны DJI ограничивают радиус поворота путевой точки 1/3 длины кратчайшего смежного сегмента. Если значение «Радиус поворота» установлено выше, UgCS автоматически уменьшает его до максимально допустимого значения.
Максимальная высота над уровнем земли, м — это ограничение по высоте для маршрута. Обратите внимание, что тип максимальной высоты (над уровнем моря или над землей) изменится, если изменится тип высоты для маршрута (см. ниже).
Действия при потере сигнала GPS, действия при потере сигнала RC, действия при разрядке аккумулятора и потере связи с сервером — это заранее заданные действия в чрезвычайных ситуациях. Во всех случаях можно выбрать вариант ожидания или посадки устройства. Также доступны варианты возврата в исходную точку и продолжения полёта по маршруту при условии, что GPS работает.
Обычно требуется указать только начальную точку и безопасную высоту; остальные параметры имеют разумные значения по умолчанию, основанные на известных характеристиках транспортного средства. Тем не менее следует убедиться, что значения по умолчанию указаны верно. Программа выполнит проверку и отменит создание маршрута, если будут указаны неверные или конфликтующие значения параметров. Уведомления об ошибках в значениях будут отображаться в нижней части окна, а соответствующий параметр будет выделен.
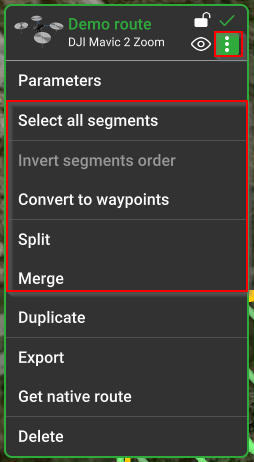
Удерживая клавишу CTRL (cmd для macOS), выделите несколько сегментов, чтобы добавить или отредактировать общие действия. Чтобы выделить все сегменты, нажмите CTRL+A в Windows или cmd+A в macOS.
При выборе нескольких сегментов будут доступны следующие функции:
- добавить новое действие;
- удалить действие.
Действия можно добавлять/редактировать для сегментов, если они расположены в одном и том же порядке и имеют одинаковое значение
Позволяет изменить направление полёта на противоположное, то есть инвертировать.
Позволяет преобразовать любой автоматически созданный маршрут в отдельные путевые точки. При этом создается новый маршрут. Исходный маршрут становится скрытым и заблокированным.
Разбивает исходный маршрут на две или более частей.
Существует несколько способов разбить маршрут на части:
- Вручную — разделить маршрут на определенном участке (участках). Чтобы разделить маршрут более чем на две части, введите несколько номеров участков, разделенных запятой. Указанный номер участка будет последним участком первой части маршрута.
- Разделить по расстоянию — разделить маршруты на определенном расстоянии, указанном в поле «Расстояние».
- Допуск — если существующая путевая точка находится в пределах допуска от места разделения, будет использована существующая путевая точка. В противном случае будет создана новая путевая точка.
- Limit — определяет допустимое количество частей, на которые должен быть разделён маршрут.
Перекрытие — это участок, который добавляется перед каждой разделённой частью, кроме первой.
Позволяет объединить два отдельных маршрута в один.
Эта опция позволяет экспортировать маршруты в формате TXT, который подходит для импорта в собственное программное обеспечение для дронов на базе PixHawk.