Маневр для калибровки IMU
Перед началом старта по каждому маршруту для ВЛС или МЛС на лазерном сканере TOPODRONE, после прохождения процедуры инициализации, необходимо выполнить калибровочный маневр. Данный маневр выполняется для калибровки модуля IMU внутри лазерного сканера TOPODRONE. Без выполнения данного калибровочного маневра перед началом маршрута, качество данных может быть не удовлетворительным.
В процессе калибровки на летательном аппарате необходимо перемещаться в плоскости на рабочей высоте по окружности один раз по часовой стрелке и один раз против часовой стрелки, последовательность не имеет значения. Важным моментом является необходимость изменения пространственного положения лазерного сканера TOPODRONE, в связи с этим, вариант с вращением вокруг своей оси по аналогии с калибровкой компаса на дронах DJI, не подходит.
Выполнение калибровки лазерного сканера TOPODRONE для ВЛС в автоматическом режиме.
Выполнить калибровочный маневр в виде восьмерки на дронах DJI можно двумя способами: автоматическим и ручным. Возможность автоматического выполнения зависит от используемого программного обеспечения для планирования полетных заданий. ПО UgCS Pro / Expert позволяет выполнить процедуру калибровки в автоматическом режиме.
Для выполнения автоматического полета по «восьмерке» в ПО UgCS выполните следующие действия:
- Создайте новый маршрут, выбрав необходимый профиль дрона и установив нужные параметры высоты возврата домой, действия при потере сигнала пульта и т.п.
- Используя инструмент «Путевая точка» установите точку взлета, которая будет являться первой путевой точкой маршрута. Установите параметр «высота над землей» в соответствии с рабочей высотой.
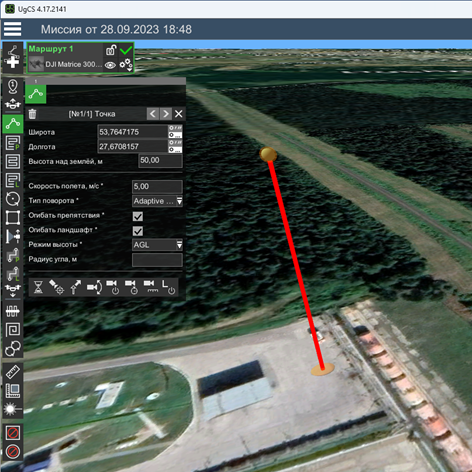
Установка путевой точки перед началом калибровочного маневра «восьмерка» в ПО UgCS Pro / Expert.
- Используя инструмент «Полет по окружности» с помощью двойного щелчка левой мыши создайте полет по кругу так, чтобы он касался первой путевой точки «Взлет». Рекомендуется использовать/изменить следующие параметры:
- Высота: 60-120 м в соответствии с рабочей высотой для вашего сенсора(см. п.2)
- Радиус: 10-60 метров
- Скорость полета: 6-10 метров в секунду
- Тип поворота: Adaptive Bank Turn (данный параметр сглаживает углы)
- Обход по часовой стрелки: да (нет для второго круга)
- Число аппроксимирующих точек: 7
- Следовать по рельефу: нет
- Режим высоты: AGL (высота будет рассчитываться относительно рельефа)
- POI – удалить (по умолчанию POI ориентирует перед дрона к центру окружности)
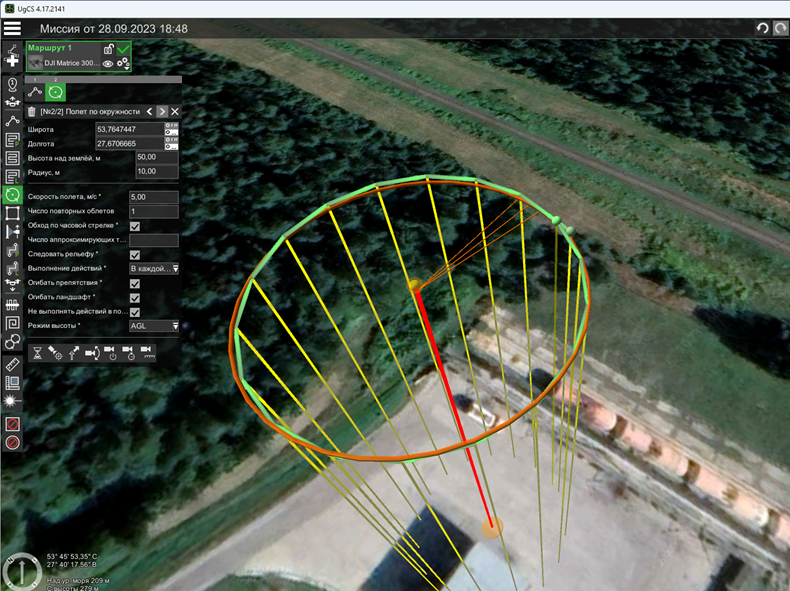
Установка первого круга калибровочного маневра «восьмерка» в ПО UgCS Pro / Expert. Обратите внимание на необходимость удаления действия POI
- Используя инструмент «Полет по окружности» с помощью двойного щелчка левой мыши создайте второй полет по кругу так, чтобы он касался первой путевой точки и первой окружности. Рекомендуется использовать параметры аналогичные п. 3, за исключением параметра «Обход по часовой стрелки», которые должны быть разными для двух кругов.
Обход по часовой стрелки: нет (да для второго круга)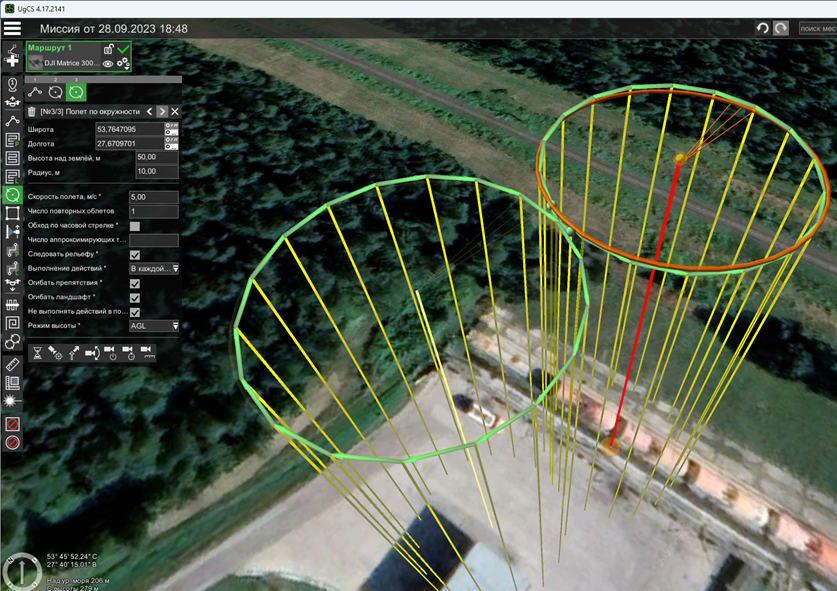
Установка второго круга калибровочного маневра «восьмерка» в ПО UgCS Pro / Expert.Обратите внимание на необходимость полета по кругам в разных направлениях.
Выполнение калибровки лазерного сканера TOPODRONE для ВЛС в ручном режиме.
В случае невозможности выполнить калибровочного маневра в автоматическом режиме (отсутствие ПО UgCS Pro / Expert), необходимо выполнить данный маневр в ручном режиме перед началом полета по основному маршруту. Для этого выполните следующие действия:
- Подготовьте квадрокоптер DJI и лазерный сканер TOPODRONE к эксплуатации на открытой местности, согласно инструкции, при наличии достаточного уровня ГНСС сигнала.
- Включите дрон, дождитесь процедуры инициализации квадрокоптера и LiDAR
- Выполните калибровку компаса квадрокоптера DJI перед запуском дрона, согласно инструкции к квадрокоптеру.
- Выполнение калибровки компаса строго необходимо каждый раз перед первым полетом на новой местности.
- Вручную в режиме «Р» взлетите на рабочую высоту.
- Достигнув дроном рабочей высоты, переключитесь на режим «T» - Tripod (при наличии).
- Выполните маневрирование при помощи стиков управления. Для выполнения полета по первому кругу (по часовой стрелки) удерживайте левый стик вправо, а правый стик вперед. Такая комбинация позволит квадрокоптеру DJI описывать круг с сохранением высоты. После замыкания дроном первого круга, не меняя положения правого стика (вперед), измените положение левого стика в соответствии с направлением против часовой стрелки (влево).
- В случае использования режима «T» - Tripod маневрирование стиками можно осуществлять, доводя их до крайних значений. Ограничение скорости и плавность хода будут достигаться за счет особенностей полета в режиме «T» - Tripod. В случае отсутствия режима Tripod в квадрокоптере как одного из подрежимов полета мы рекомендуем выполнять маневрирование стиками максимально плавно без резких движений.
- После завершения прохода по второму кругу, маневр калибровочный маневр выполнен. После завершения процедуры калибровки лазерного сканера TOPODRONE в ручном режиме выполните отправку полетного задания на квадрокоптер и начните выполнение основной части полета.
- В процессе выполнения полета по восьмерке можно контролировать радиус поворота дрона при помощи вида «Карта» в приложении на мобильном устройстве, а также визуально, смотря в небо на дрон в полете.
Выполнение калибровочного маневра для МЛС при использовании TOPODRONE BackPack.
- Подготовьте TOPODRONE BackPack и лазерный сканер TOPODRONE к эксплуатации на открытой местности, согласно инструкции, при наличии достаточного уровня ГНСС сигнала.
- Убедитесь, что в радиусе не менее 100 метров находятся любые объекты: здания, холмы, заборы, провода и т.п.
Включите питание лазерного сканера TOPODRONE при помощи входящего в комплект внешнего аккумулятора и кабеля питания. - Дождитесь процедуры инициализации лазерного сканера.
- Наденьте рюкзак на плечи оператора.
- Выполните проход с постоянной скоростью 5-9 км/ч по двум кругам с радиусом 10-15 метров по часовой и против часовой стрелки. Каждый круг должен быть замкнут до начала следующего этапа.
- После завершения прохода по второму кругу, маневр калибровки выполнен. Можно приступать к выполнению основного задания.
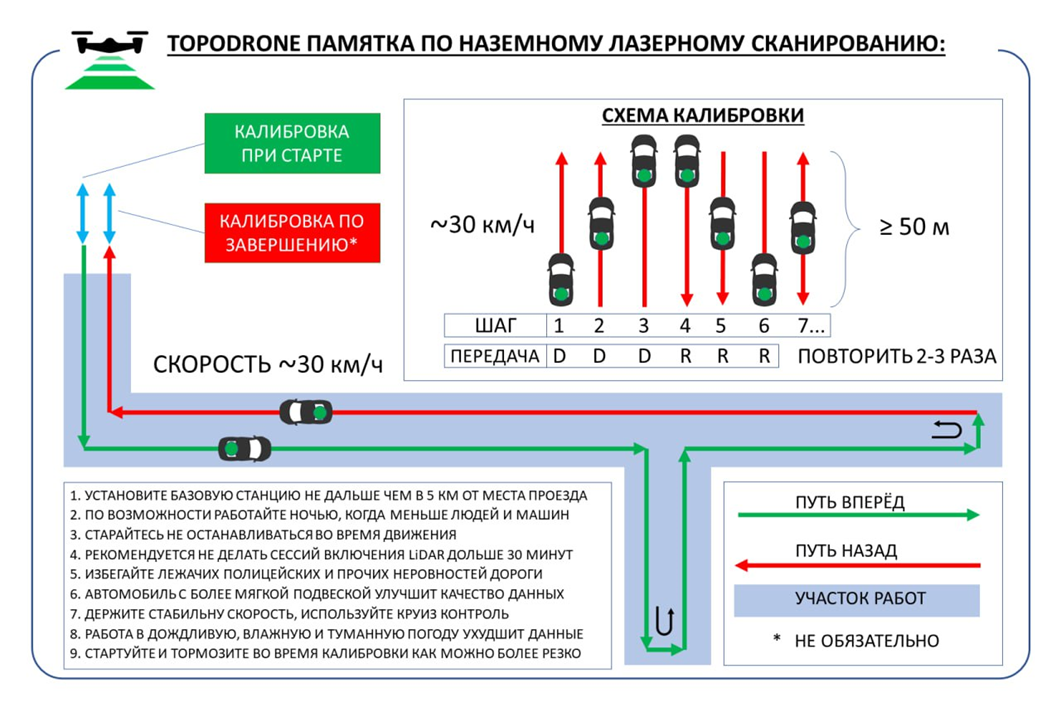
Выполнение калибровочного маневра для МЛС при использовании крепления на автомобиль.
- Подготовьте автомобильное крепление TOPODRONE и лазерный сканер к эксплуатации на открытой местности, согласно инструкции, при наличии достаточного уровня ГНСС сигнала.
- Убедитесь, что в радиусе не менее 100 метров находятся любые объекты: здания, холмы, заборы, провода и т.п.
- Установите автомобильное крепление вместе с лазерным сканером на крышу автомобиля таким образом, чтобы выходящий из сенсора кабель и идущий в корпус TOPODRONE должен смотреть назад по ходу движения.
- Включите питание лазерного сканера TOPODRONE при помощи входящего в комплект внешнего аккумулятора и кабеля питания.
- Дождитесь процедуры инициализации лазерного сканера.
- Выполните проезд с постоянной скоростью 20-30 км/ч вперед на дистанцию 50-100 метров с возвращением в исходную точку задним ходом с той же скоростью. Повторить данный этап 2-3 раза.
- После завершения проездов, маневр калибровки выполнен. Можно приступать к выполнению основного задания.