
Point Cloud Tools
Remove Outliers
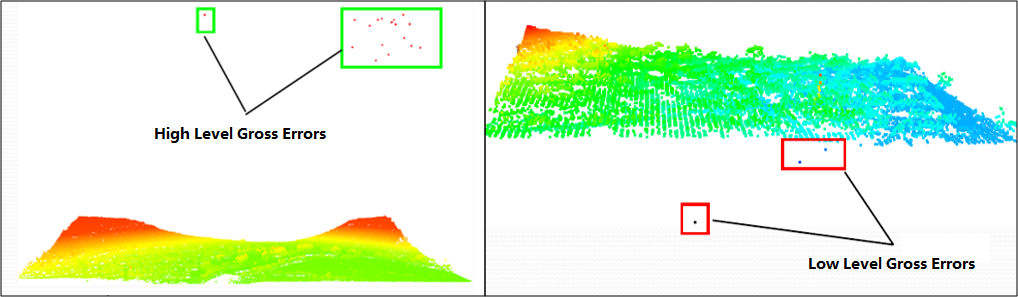
К распространённым шумам относятся грубые ошибки высокого уровня и грубые ошибки низкого уровня. Как показано ниже, грубые ошибки высокого уровня обычно возникают из-за отражений от высоколетящих объектов (например, птиц или самолётов) в процессе сбора данных; грубые ошибки низкого уровня — это отражения с очень низким углом наклона, вызванные многолучевым эффектом лазерного импульса. Инструмент «Удаление выбросов» призван максимально устранить эти ошибки и тем самым повысить качество данных.
Сначала алгоритм ищет соседние точки для каждой точки в пределах заданной пользователем области и вычисляет среднее расстояние от точки до соседних точек. Затем вычисляются среднее значение и стандартное отклонение этих средних расстояний для всех точек. Если среднее расстояние от точки до соседних точек больше максимального расстояния (максимальное расстояние = среднее значение + n * стандартное отклонение, где n — заданное пользователем кратное число), точка считается выбросом и удаляется из исходного облака точек.
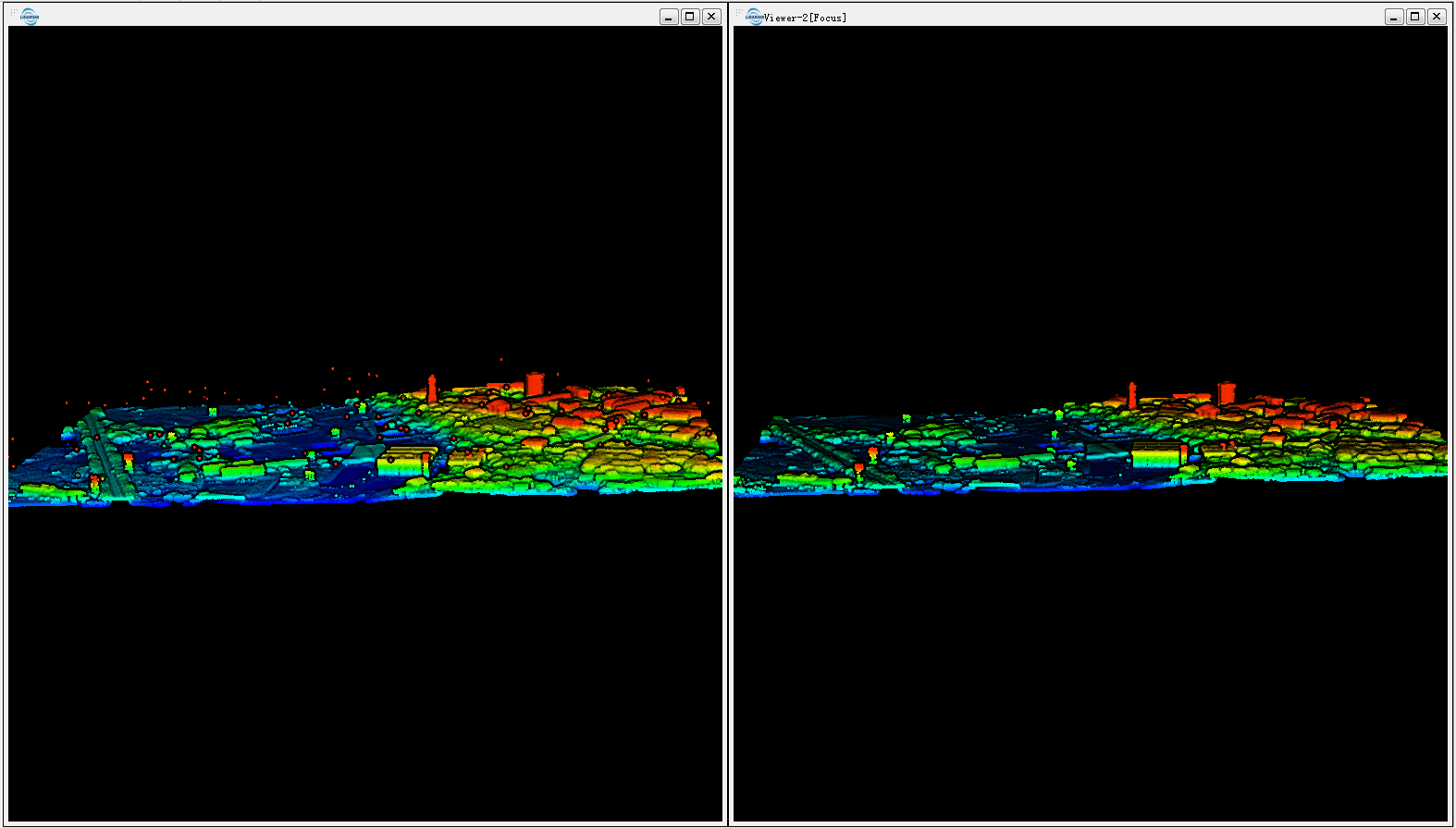
Эффектное изображение:
Использование
Нажмите Управление данными> Инструменты облака точек> Удалить выбросы
Настройки
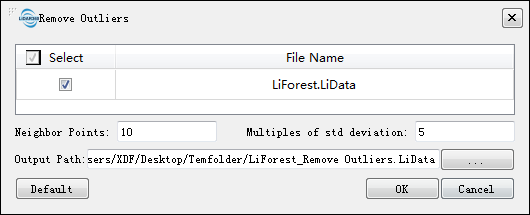
- Входные данные: входным файлом может быть как один файл с данными облака точек, так и несколько файлов с данными. Формат файла: *.LiData.
- Соседние точки (значение по умолчанию — "10"): количество точек, необходимых для вычисления среднего расстояния до каждой точки. Если точек недостаточно, алгоритм не будет выполнен.
- Кратность стандартного отклонения (значение по умолчанию — "5"): коэффициент, на который умножается стандартное отклонение для вычисления максимального расстояния.
- Путь вывода: путь к выходному файлу. После выполнения функции будет создан новый файл. Если указано несколько файлов, путь должен вести к папке.
- Параллельная установка: использовать ли механизм параллельных вычислений многоядерного процессора для удаления выбросов.
Примечание: алгоритм этой функции можно применять повторно для улучшения результатов шумоподавления. Результаты удаления выбросов могут быть ограничены, если шумы слишком интенсивные.
Noise Filter
Удалите выбросы из данных облака точек. В отличие от функции удаления выбросов, эта функция обеспечивает более высокую производительность обработки (отфильтровывает больше выбросов) на объектах с плоской поверхностью (таких как стены, внутренние стены туннелей и земля).
Использование
Нажмите Управление данными> Инструменты облака точек> Фильтр шума.
Настройки
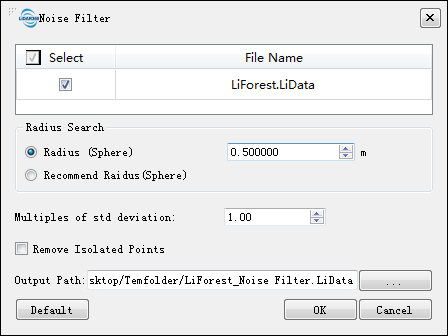
- Входные данные: входными данными может быть как один файл облака точек, так и набор данных облака точек; эти данные необходимо предварительно открыть в программе LiDAR360.
- Радиус (значение по умолчанию — «0,5 м»): установите радиус плоскости аппроксимации. Эту функцию можно использовать, если пользователю известна приблизительная плотность данных облака точек.
- Рекомендуемый радиус: автоматически рассчитайте подходящий радиус поиска на основе входных данных облака точек.
- Кратное отклонению std (значение по умолчанию “1.0”): Использование относительной ошибки (сигма) в качестве параметра для удаления выбросов. Алгоритм автоматически вычислит стандартное отклонение (stddev) окружающей точку P плоскости подгонки. Еслиe расстояние, d, от этой точки до этой плоскости меньше сигма * stddev, эта точка, P, будет сохранена. Значение r увеличение этой относительной погрешности приводит к удалению большего количества баллов. Наоборот будет сохранено больше точек. Изменение этого параметра не повлияет на эффективность.
- Удаление изолированных точек: Точка будет считаться изолированной, если в радиусе поиска находится менее 4 точек (нельзя создать плоскость аппроксимации с менее чем 4 точками).
- Путь к выходным данным: данные облака точек будут сохранены по этому пути после удаления выбросов.
Merge
Объедините несколько файлов облака точек в один файл облака точек. Эта функция является обратной операцией с фрагментом по диапазону и фрагментом по номеру точки.
Использование
Нажмите Управление данными> Инструменты облака точек > Объединить
Настройки
- Игнорировать различные дополнительные атрибуты: если входных наборов данных несколько и этот параметр отмечен, то будут объединены только одинаковые дополнительные атрибуты. Если есть какие-либо различные дополнительные атрибуты и этот параметр не отмечен, то объединение невозможно.
- Входные данные: входным файлом может быть как один файл с данными облака точек, так и несколько файлов с данными. Формат файла: *.LiData.
- Путь к выходным данным: путь к выходной папке. После выполнения алгоритма будет создан новый файл.
Subsampling
Субдискретизация облаков точек, а именно уменьшение количества облаков точек, LiDAR360 предлагает три метода повторной выборки: минимальное расстояние между точками, частоту дискретизации и октодерево.
Использование
Выберите Управление данными> Инструменты облака точек> Субдискретизация
Настройки
- Входные данные: входной файл может представлять собой один файл с данными облака точек или несколько файлов с данными. Формат файла: *.LiData.
-
Тип выборки: этот параметр определяет метод повторной выборки.
- Минимальное расстояние между точками (по умолчанию, значение по умолчанию — "0,0000"): пользователям необходимо установить минимальное расстояние между двумя точками, чтобы минимальное трёхмерное расстояние между любыми двумя точками в облаке точек выборки не было меньше этого значения. Чем больше значение, тем меньше точек будет сохранено.
- Частота дискретизации (значение по умолчанию — "99,99%"): пользователям необходимо установить процент зарезервированных точек. В этом режиме LiDAR360 будет случайным образом сохранять указанное количество точек. Зарезервированные точки = общее количество точек * частота дискретизации. Значение этого параметра варьируется от 0 до 100 %. Чем меньше значение, тем меньше точек будет сохранено.
- Октодерево (значение по умолчанию — «21»): этот метод позволяет пользователям выбирать уровень подразделения «октодерева» и создавать трёхмерные воксели для входного облака точек. Будет сохранена только точка, ближайшая к центру каждого вокселя. Уровень разделения «октетра» варьируется от 1 до 21. Чем меньше значение, тем меньше точек будет сохранено.
-
Путь вывода: путь к выходному файлу. После выполнения функции будет создан новый файл.
Smooth Points
Сгладьте облако точек лазера на основе соседних точек, чтобы облако точек выглядело более однородным.
Использование
Нажмите Управление данными> Инструменты для создания облака точек> Сгладить точки..
Настройки
- Входные данные облака точек: Введите данные облака точек LiData, которые необходимо сгладить.
- Тип сглаживания:
- XYZ (по умолчанию) :В процессе 3D-сглаживания точки на вертикальной плоскости сглаживаются в направлении XY, а точки на горизонтальной плоскости сглаживаются в направлении Z.
- Высота : Подберите наиболее подходящее уравнение плоскости в соответствии с соседними точками и отрегулируйте высоту центральной точки, чтобы лучше соответствовать уравнению плоскости. Если расстояние регулировки превышает пороговое значение для ремонта, регулировка производиться не будет.
- Радиус поиска (м) (значение по умолчанию — «0,2»): Радиус поиска соседних точек.
- Максимальное фиксированное расстояние (м) (значение по умолчанию — «0,1»): Максимальное пороговое значение расстояния для корректировки одной точки, при превышении которого корректировка не выполняется.
- Путь к выходным данным: Укажите путь к выходным данным для файлов с плавным облаком точек, созданных в процессе сглаживания.
- По умолчанию: Восстановите параметры настройки до значений по умолчанию.
- Настройки параллельных вычислений: следует ли использовать механизм параллельных вычислений многоядерного процессора для сглаживания.