
Контрольные точки для DJI Mavic 3 Enterprise
Для оценки точности полученных результатов после выполнения постобработки данных, на этапе полевых работ необходимо выполнять маркировку и планово-высотную привязку контрольных точек на земле (GCP – Ground Control Points). Под контрольными точками понимаются точки, расположенные на открытой местности и хорошо дешифрируемые на фотоснимках, которые имеют координаты с геодезической точностью. Контрольные точки не участвуют в процессе обработки, их не следует путать с опорными точками.
| Для контроля результатов контрольные точки рекомендуется размещать на ровной и сухой поверхности и выполнять их привязку до выполнения АФС. Оптимальными поверхностями для координирования контрольных точек являются дороги, тропинки и прочие подобные элементы. В качестве контрольных точек подходят элементы дорожной разметки, люки канализаций, кресты из контрастной краски, белые тарелки, закрепленные в грунт гвоздем, специальные опознаки с шашечным рисунком и т.п. Планово-высотную привязку точек необходимо производить при помощи геодезического оборудования (тахеометр или ГНСС приемник). |
 |
 |
Рекомендуется располагать контрольные точки равномерно по всему объекту съемки.
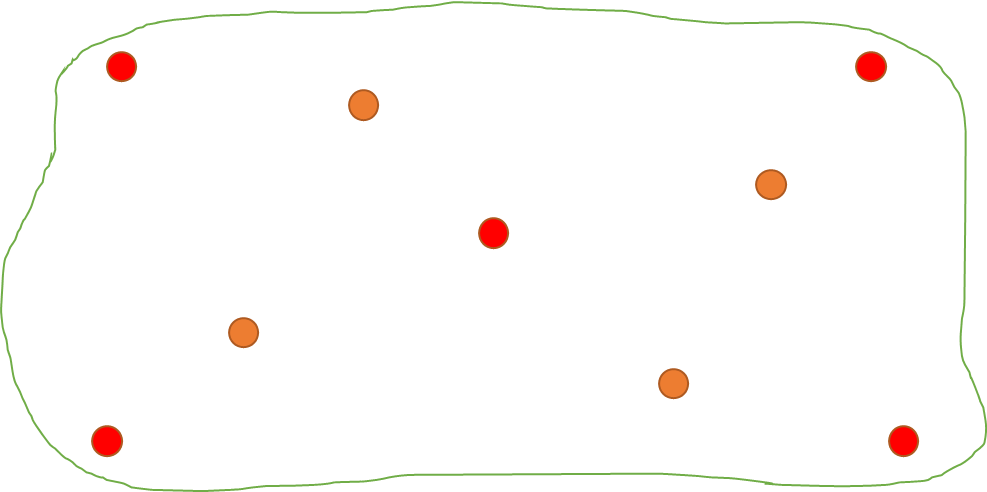
Расположение контрольных точек на объекте.
Для расчета расстояния между контрольными точками:
L=𝑅∗20 000 pix
L – расстояние между контрольными точками
R – пространственное разрешение снимков
если R =0.025 м/pix
то L=0.025 м/pix*20 000 pix=500 м
Система координат контрольных точек должна быть аналогична системе координат базовой станции и проекта в целом. На начальном этапе при получении оборудования рекомендуется набирать большое количество контрольных точек, это нужно для понимания возможностей оборудования и иметь обширную выборку даля проведения контроля точности полученных резульнтатов. Впослейшемдствии количество точек можно сокраптимизировать.
Расположение контрольных точек на объекте.
Для расчета расстояния между контрольными точками:
L=𝑅∗20 000 pix
L – расстояние между контрольными точкамиR – пространственное разрешение снимков
если R =0.025 м/pixто L=0.025 м/pix*20 000 pix=500 м